
Как изменялась Windows с 1985 года (скриншоты всех версий)
Начавшаяся в конце прошлого века так называемая «цифровая» или «компьютерная» эра превратила названия многих брендов в слова нарицательные, которыми многие по сей день обозначают целые семейства программ или устройств. Например, все копиры с легкой руки неискушенных пользователей превратились в «ксероксы», графические редакторы обобщены по маркой «фотошоп», а любая операционная система стала именоваться попросту «виндой».
Заслужить такое народное признание весьма непросто, а поддержание подобной «монополии» в своем сегменте рынка стоило каждой из компаний титанических усилий. Например, Microsoft все тридцать с лишним лет существования Windows регулярно «радует» своих поклонников откровенно провальными версиями ОС, однако ценой дорогущих маркетинговых кампаний и привлечения лучших специалистов для работы над ошибками продолжает оставаться производителем десктопного ПО «№1» во всем мире.
А вот как все начиналось…
Windows 1.0
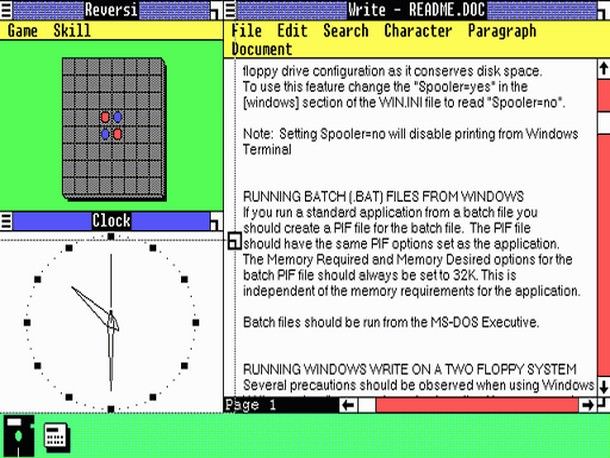
Спустя два года после анонса, в конце ноября 1985 года, увидела свет 16-битная операционная система Microsoft Windows 1.0. По словам современников, результат трудов редмондских разработчиков все же не смог обогнать по удобству работы созданную в то же время платформу компании Apple. По сути, Windows 1.0 являлась надстройкой над MS-DOS. Любопытно, что в Microsoft прекратили поддержку первых «окон» лишь 31 декабря 2001 года.
Windows 2.0
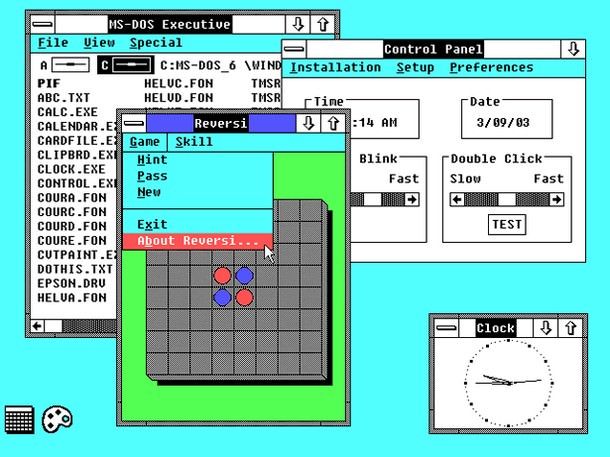
Вторая версия ОС компании Microsoft вышла спустя два года после первой, в декабре 1987 года. Значительных инноваций, как таковых, не было. Можно лишь упомянуть способность окон в системе, перекрывать друг друга.
Windows/286 2.10 и Windows/386 2.10
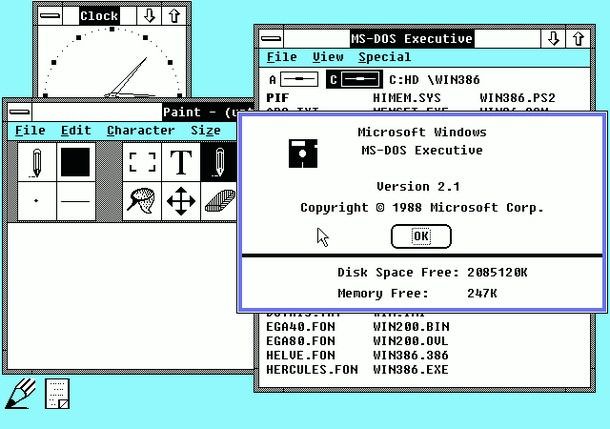
Обе версии были выпущены в 1988 году. В связи с выходом новых процессоров Intel 80286 и Intel 80386 платформы были адаптированы под них. Основными нововведениями в Windows/286 стало наличие драйвера расширенной памяти (himem.sys), а в Windows/386 появился защищенный пароль. Выпуск этих двух «пристроек» был продиктован превышением компанией Microsoft барьера организации адресации оперативной памяти. Иначе говоря знаменитые слова Гейтса о том, что 640 КБ хватит всем, перестали быть актуальными.
Windows 3.0
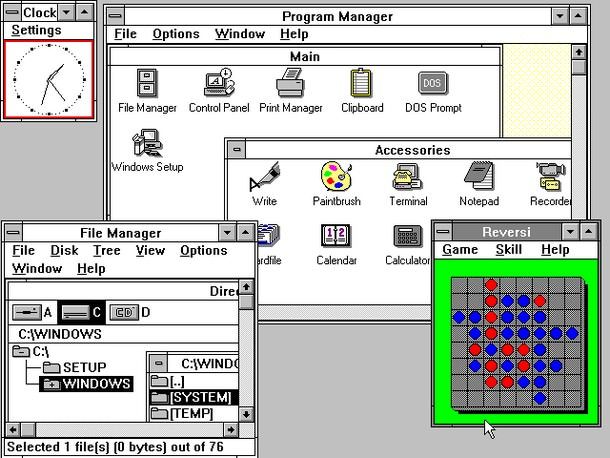
Windows 3.0 была куда популярнее предшественников, однако оставалась далека до показателей востребованности ОС от Apple, стоявшей на Macintosh, и платформы Amiga от Commodore. Минимальные системные требования данной версии «окон» были с точки зрения современных программ более чем скромными, а на те времена являлись стандартными — 384 КБ оперативной памяти и свободные 6-7 Мб на диске. К слову, в этой версии впервые появилась любимая игра домохозяек — «Пасьянс».
Windows 3.1 и 3.11
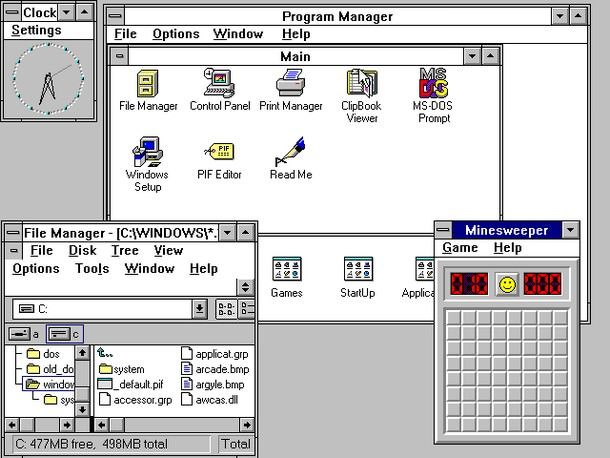
Первые, бьющие собственные рекорды популярности, версии ОС, которые, между прочим, принесли компании Microsoft звание «самой инновационной компании США» по версии журнала Forbes в 1992 году. Запомнились пользователям эти версии появлением в них игры «Сапер» и поддержкой мультимедиа.
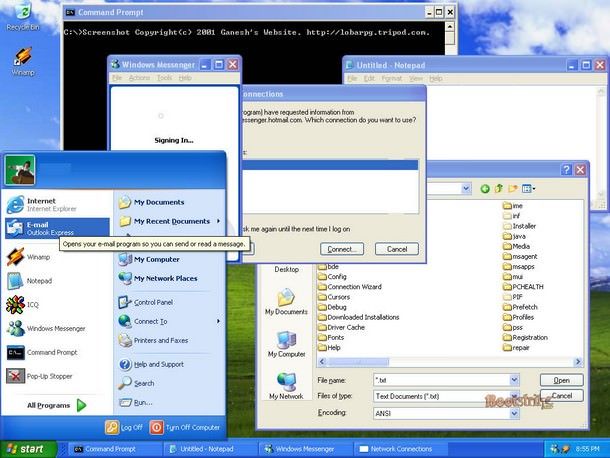
Windows 95

Фактически «звездный час» компании Microsoft. Данная версия операционной системы появилась в конце августа 1995 года и быстро убрав со сцены главного конкурента в лице OS/2 от IBM, завоевала небывалую доселе популярность. Это была последняя ОС, которая поставлялась на дискетах. Отличительные особенности Windows 95 известны до сих пор — Проводник, панель задач и кнопка «Пуск». Кроме того в новинку была возможность мгновенной смены разрешения монитора, а также подключения устройств plug-n-play. Между прочим именно в этой версии впервые появился «синий экран смерти».
Windows 98
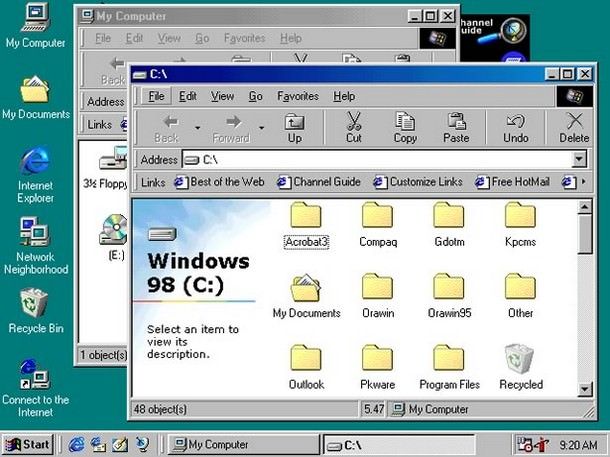
Фактически подкорректированная версия Windows 95, в которой расширили поддержку устройств USB. Знаменита также ситуацией с презентацией ОС, когда при подключении к сканеру появился «синий экран смерти», после чего выпуск системы отложили.
Windows 2000
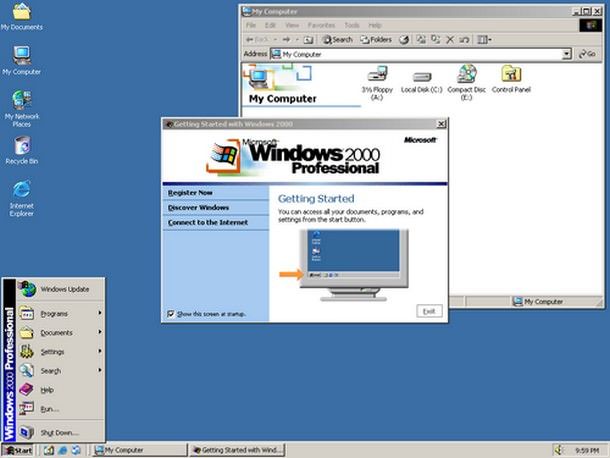
Является пиковой по популярности и по развитию в «профессиональной» линейке Windows NT. Запуск произошел в 1999-2000 гг.
Windows Me
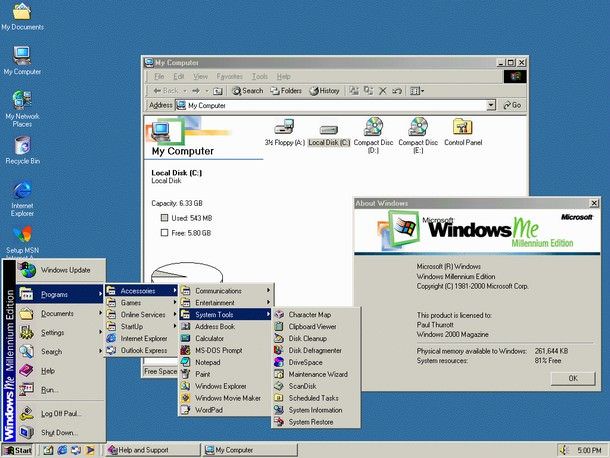
Версия для домашнего пользования. Вышла в 2000 году, являлась последней операционной системой семейства 9.x. Системные требования были таковы — процессор Pentium II 300 МГц, ОЗУ 64 Мб и 2 ГБ дискового пространства.
Windows XP
Вновь «одомашненная» версия ОС, но основанная на более надежном серверном ядре Windows NT. Благодаря исключительному удобству в работе стала самой популярной в мире операционной системой, причем звание это удерживала десять лет — с момента выпуска в 2001 году и по 2011 год. В 2012 году осталась второй по популярности после Windows 7. Рыночная доля данной ОС в 2007 году достигла показателя 75%.
Windows Vista
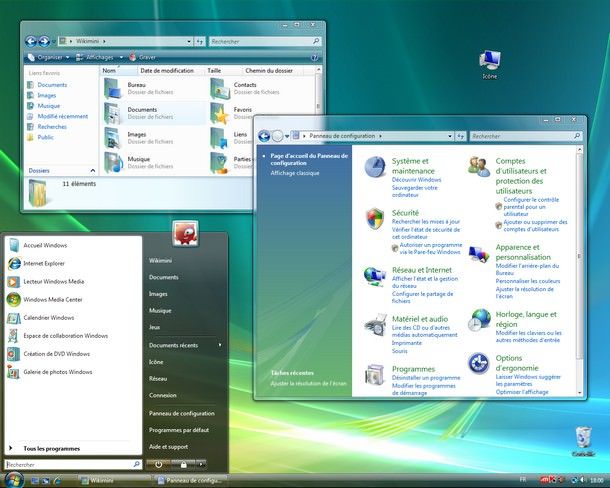
Была выпущена в двух версиях: для корпоративных клиентов — в 2006 году и для домашних ПК — в 2007 году. Из-за повышенных системных требований, а также ограничительным механизмом защиты прав (DRM) не была популярной у пользователей. Отличалась она изменением графического дизайна и улучшенной поддержкой мультимедиа.
Windows 7
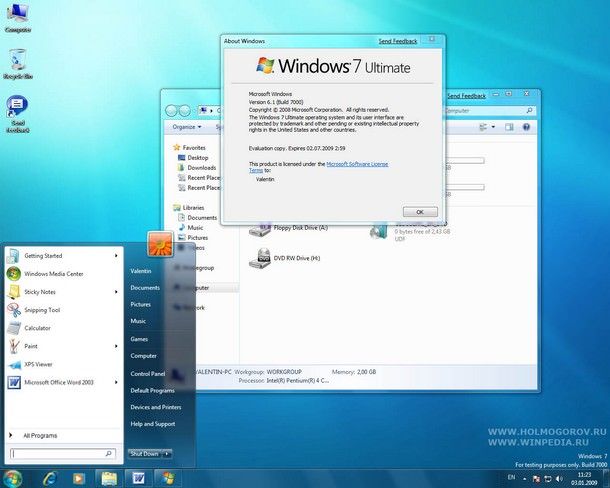
Вторая популярнейшая ОС от Microsoft после Windows XP. Вплоть до сегодняшнего дня остается самой востребованной операционной системой. В отличие от Vista в данной версии, разработчики сосредоточились на улучшении надежности и совместимости. Тем не менее, несмотря на поддержку multitouch, система является десктопной и не годится для установки на планшеты, которые продолжают набирать популярность среди пользователей.
Windows 8

В феврале 2012 года было запущено публичное тестирование новой ОС — Windows 8. Основным нововведением стала возможность установки на ARM-планшеты и оптимизация под управление пальцами. В «восьмерку» встроили виртуальный магазин Windows Store — своеобразный аналог App Store и Android Market. Системные требования новой ОС были таковы: тактовая частота от 1 ГГц, не менее 1 ГБ ОЗУ и 16-20 ГБ на жестком диске. К тому же были произведены изменения в интерфейсе и убрана кнопка «Пуск». В итоге новинка пользовалась достаточно умеренным спросом и не смогла сбросить с позиции лидера Windows 7.
Windows 10

Большинство пользователей, не вникающих в подробности и оценивающих операционную систему исходя из первых, нередко поверхностных (но зачастую правильных) ощущений, сочли «десятку» извинением Microsoft за неубедительную Windows 8. Действительно, даже по первым описаниям было ясно, что новая версия ОС будет иметь более четкие очертания.
В отличие от предшественницы, Windows 10 разрабатывалась для вполне конкретных задач, без невнятных заделов на будущее, вроде функционала для гибридных ноутбуков с сенсорными экранами или танцев с бубном вокруг кнопки «Пуск». Ключевыми нововведениями системы стали: голосовой помощник Cortana, поддержка ОС на любых устройствах (смартфоны, планшеты, ПК, Xbox и т.д.), возможность создания нескольких рабочих столов и удобного взаимодействия с ними, принципиально новый web-обозреватель Edge, пришедший на смену Internet Explorer.
Скоро трудовой рынок захватят роботы: каково будет человеку работать и жить рядом. Мнение экспертов

Ежегодно на создание и производство робототехники человечество тратит огромные средства, исчисляемые в миллиардах долларов. Еще совсем недавно подобные современные машины были оборудованием достаточно тяжеловесным и могли выполнять только самые примитивные и грубые операции. Однако в последнее время роботы все чаще становятся настоящими «коллегами» человека и работают с ним бок о бок.
Взаимодействие людей и умных машин: исследования ученых
Используются современные роботы, способные выполнять самые сложные и тонкие операции, в наши дни во многих областях человеческой жизни: в медицине, на производстве и даже в быту. И необходимость взаимодействия с умными машинами, конечно же, откладывает отпечаток в том числе и на эмоциональное состояние находящихся рядом с ними людей.

Чтобы определить, каким именно образом машины-«коллеги» влияют на человека, учеными Корнельского университета были проведены исследования. В конечном итоге специалисты смогли сделать на самом деле интересные выводы.
Мнение обычных людей, никогда не сталкивавшихся с роботами
Сначала ученые из Корнельского университета провели опросы среди обычных людей, никогда не работавших рядом с умными машинами. Такие респонденты в большинстве своем высказывались в плане возможного сотрудничества с роботами в положительном ключе. Около 60 % опрашиваемых людей легко могли представить поддержку в своей работе со стороны умной машины. При этом примерно 21 % опрашиваемых высказывали мнение о том, что такой «коллега» может стать даже лучшим вариантом, чем обычный человек. Объясняли респонденты это в основном большей степенью предсказуемости роботов и отсутствием риска совершения машиной ошибки.
Мнение людей, уже работавших с умными машинами
Конечно же, опросили ученые и более опытных в плане общения с роботами респондентов. В данном случае результаты исследований несколько отличались от проведенных на первом этапе. Люди, уже знающие «коллег»-роботов, зачастую отмечали то, что умные машины на рабочем месте с течением времени начинали их даже в чем-то раздражать.
Связывали такую свою эмоциональную реакцию опрашиваемые при этом обычно именно с программным совершенством машин в плане выполнения тех или иных операций. Неспособные ошибаться роботы зачастую делают одну и ту же работу лучше находящихся рядом людей. В результате сотрудники организации или предприятия начинают сомневаться в своих способностях, испытывая чувство неполноценности.

Какими могут быть последствия эмоционального дискомфорта
По мнению ученых, результаты проведенного ими исследования в последующем должны будут учитываться в том числе и компаниями, специализирующимися на производстве робототехники. Конечно же, проектирование и создание умных машин — дело необходимое. Однако масштабное использование подобного оборудования на предприятиях и в разного рода организациях, по мнению специалистов, может привести и к такому неприятному результату, как снижение производительности труда обычных работников.
Объясняют такую свою точку зрения ученые достаточно просто. Изучая поведенческие факторы людей, исследователи уже давно сделали один очень интересный вывод. Желание выполнять свою работу хорошо, а также развиваться в профессиональной деятельности у человека резко падает тогда, когда рядом с ним находится кто-либо, выполняющий ту же работу лучше.
Неврологическое действие
Проведя опросы, специалисты Корнельского университета, таким образом, получили очень важные результаты. Но еще дальше пошли ученые из университета Экс-Марселя. Специалисты этого центра решили выявить, какое оказывают на человека роботы-«коллеги» неврологическое влияние.
При проведении исследований ученые Экс-Марселя выявили в том числе и тот факт, что отвечающая за социальную удовлетворенность область мозга человека при общении с роботами активизируется гораздо слабее, чем при взаимодействии с людьми. Вывод из этого можно сделать простой. Возможно, роботы и раздражают людей на рабочем месте. Однако при этом реагируют на них сотрудники организаций и предприятий гораздо менее выражено и эмоционально, чем на обычных коллег, выполняющих ту же работу.
При регистрации мозговой активности добровольцев с использованием МРТ исследователи выявили явные различия в гипоталамусе, миндалинах и базальных ганглиях при реакции на коллегу робота или человека. Во всех трех областях активность возрастала при общении с людьми и резко падала при взаимодействии с умными машинами.

Эмоции роботов и людей
Провели ученые Экс-Марселя и еще одно интересное исследование. Специалисты спрашивали у добровольцев — хотели ли бы они, чтобы их «коллеги»-роботы были, помимо всего прочего, запрограммированы на имитацию эмоций. На этот вопрос большинство респондентов ответили отрицательно.
Также, согласно результатам проведенных исследований, многие люди не хотели бы видеть робота и своим начальником. При этом большинство опрашиваемых мотивировали такое свое мнение именно тем, что машина в любом случае лишена каких-либо эмоций. Начальнику-роботу будет абсолютно все равно — заболел ли ребенок у подчиненного или, к примеру, у него возникли еще какие-либо серьезные семейные проблемы. Сочувствовать и делать поблажек лишенные эмоций роботы не могут.
Напарник, соперник или угроза: что не так с ИИ и роботами
В июне 2020 года стало известно о том, что попытки Apple заменить роботами сборщиков iPhone окончились неудачей. Компания восемь лет пыталась полностью автоматизировать производство, но пока что роботы справляются хуже, чем люди. Еще в 2012-м Тим Кук планировал внедрить 1 млн роботов через два года, вдохновившись экспериментальной линией Foxconn по сборке планшетов iPad.
Для этих разработок Apple специально открыла лабораторию, которая должна была сократить число сотрудников в два раза. В итоге даже спустя семь лет число машин на сборке составило всего 100 тыс., а сама лаборатория закрылась. К примеру, роботы так и не научились аккуратно наносить клей и закручивать мельчайшие винтики. Позже роботам пытались доверить сборку MacBook 12, но и это закончилось провалом — а также убытками на миллионы долларов: из-за недостатков конструкции модель пришлось снять с продажи.
Разумеется, опыт одной компании — хоть и лидера рынка — еще ни о чем не говорит. Однако это повод задуматься: что еще не так с роботами? И не слишком ли мы уповаем на них?
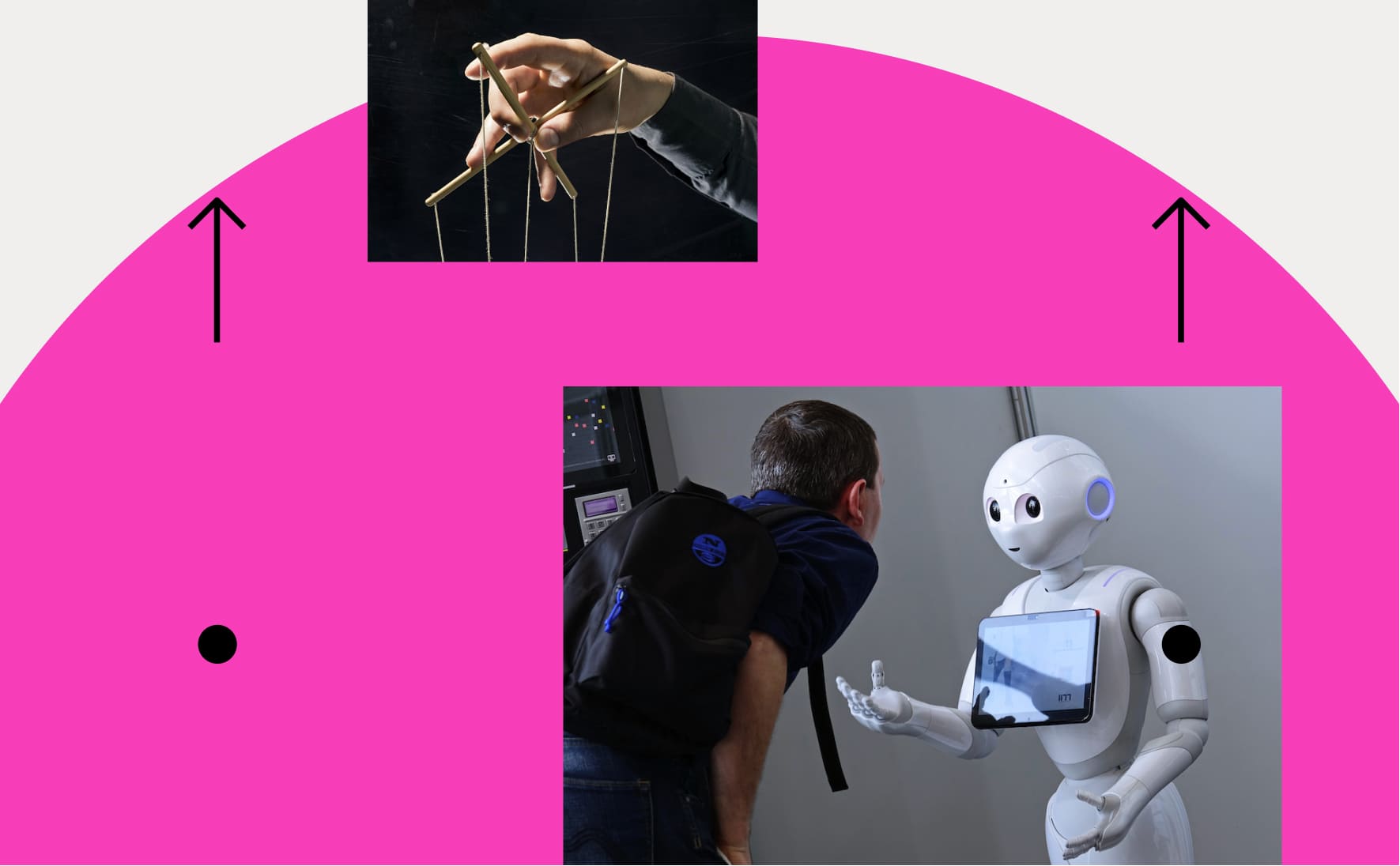
Как ИИ и роботы управляют людьми
Роботизацией увлеклись и другие американские корпорации, причем роботов там используют, чтобы сотрудники работали лучше.
К примеру, в Amazon роботы следят за эффективностью рабочих с помощью чек-листа и подгоняют отстающих, а то и способствуют увольнению. На складе работает 300 сотрудников и два руководителя, которые просто не успевают отслеживать каждый случай — и полагаются на систему.
В call-центрах роботы заставляют операторов принимать больше звонков и сокращать паузы, в службах доставки — прокладывают оптимальный маршрут, чтобы доставить больше посылок. Даже обычных офисных работников специальные алгоритмы вынуждают как можно меньше отвлекаться на перекусы и посторонние сайты.
Итог закономерный: сотрудники работают быстрее, но хуже, страдают от постоянного давления и стресса, получают травмы. В конце концов, многие просто увольняются.
Только за 2018 год в том же Amazon из-за подгоняющих алгоритмов физически пострадали 10% сотрудников на 23 складах. У большинства рабочих начались хронические боли из-за перенапряжения мышц и суставов. В итоге компания поставила на складах автоматы с обезболивающим.
В 2019-м сотрудники Amazon вышли протестовать против условий труда, которые им навязывают машины и которые они считают нечеловеческими. Во всех смыслах. К примеру, алгоритмы считали простоями перекусы, минуты отдыха, походы в туалет и регулярные молитвы.
Вскрылась и другая проблема: роботы не обладают эмпатией, поэтому им сложно распознавать эмоции. В случае со звонками в call-центр это — очень важный критерий, который алгоритм полностью игнорирует. К примеру, система может принять громкий голос или специфическую манеру речи оператора за негатив и агрессию.
Другими словами, роботы хорошо следят за темпом работы и числовыми KPI, но не умеют адекватно оценивать качество человеческого труда.
Этические и юридические проблемы
Роботы ошибаются, не справляются с форс-мажорными ситуациями или просто выходят из строя — все это большие проблемы, но далеко не единственные. До сих пор нет однозначного ответа на вопрос: кто будет отвечать, если робот травмирует или даже убьет человека?
Один из трех главных законов робототехники писателя-фантаста Айзека Азимова гласит: «Робот не может причинить вред человеку». При этом еще в 1968 году в фильме «2001: Космическая Одиссея» Стенли Кубрика показан сюжет о том, как искусственный интеллект вступает в схватку с экипажем космического корабля.

Первый реальный случай был зафиксирован в Китае в 2016-м: на выставке China Hi-Tech Fair в Шеньжэне робот Little Chubby начал крушить стенд и даже повредил ногу одного из сотрудников. Последнего госпитализировали.
В 2018 году беспилотник Uber в США сбил велосипедистку, которая перебегала дорогу в неположенном месте. После длительного разбирательства вину за это возложили на всех: компанию, водителя-оператора, пешехода и даже власти штата.
Все это, конечно, не добавляет доверия к роботам и ИИ. Начиная с 2012 года жители ЕС все более скептически относятся к роботам в медицине, присмотре за детьми, уходе за больными и стариками, а также в офисах. Россияне думают примерно так же: роботу-сиделке доверили бы 19% опрошенных, а хирургу — 14%. То есть все, что касается жизни и здоровья человека мы считаем сферой, куда роботов допускать не стоит.
Пока что законодательно у нас начинают прорабатывать все, что касается дронов и квадрокоптеров. В 2019 году вышел закон, который требует регистрировать беспилотные летательные аппараты и возлагает ответственность за несчастные случаи на их владельцев. В отношении роботов же многое до сих пор остается спорным.
Алиса Конюховская, исполнительный директор Национальной ассоциации участников рынка робототехники:
«Законодательство адаптируется, чтобы поддерживать людей. У нас есть инициатива, чтобы обезопасить людей. Но даже те кейсы, которые связаны со смертью людей на предприятиях, в промышленной робототехнике — это последствие того, что именно люди в первую очередь нарушали технику безопасности и входили в зону действия робота, когда этого делать было нельзя».
Андра Кей, управляющий директор Silicon Valley Robotics:
«Страхование — та сфера, которая в большей степени будет отвечать за это. Вам нужно будет убедить страховое агентство в том, что вы изобрели нечто очень безопасное, и тогда они поддержат этот продукт. Также у нас есть судебная система для несчастных случаев, включая не совсем обычные. Но главная опасность в том, что регулирование может иметь политическую мотивацию и часто является ответом на требования избирателей, а не результатом конструктивного выбора для всего общества».
Так ли выгодно сотрудничество людей и роботов?
В 1990 году капитализация трех крупнейших компаний Детройта составляла $36 млрд c выручкой $250 млрд на 1,2 млн сотрудников. В 2014 году три крупнейшие компании Кремниевой долины зарабатывали $1,09 трлн, из них $247 млрд чистой прибыли, при этом в них трудилось всего 137 тыс. чел. Этот пример наглядно показывает, как работает автоматизация процессов в бизнесе.
Возвращаясь к Amazon: здесь роботы экономят компании от $22 млн в год на каждом складе. Сами склады оптимизировали на 50%.
В 2015 году Adidas перенесла производство из Китая и открыла автоматизированную фабрику Speedfactory в немецком городе Ансбах. Так компания решила сократить издержки не только на производство, но и на логистику. На фабрике всего 120 сотрудников, всю основную работу выполняют роботы.
Больше всего в роботизацию вкладывают развитые страны: США, Китай, Западная Европа. И дело не только в том, что у них есть для этого ресурсы. Но и в том, что человеческий труд — вместе со всеми налогами и страховыми выплатами — здесь стоит дорого: до $12 в час в США и Германии, тогда как роботы обходятся примерно в $6 в час.

Но для Восточной Европы, где труд стоит $2 в час и меньше, роботизация уже не так выгодна.
Алиса Конюховская:
«Сейчас зачастую какие-то низкоквалифицированные повторяющиеся операции выполняет рабочая сила из ближнего зарубежья. Это одна из причин того, почему у нас не так экономически выгодно внедрять роботов. Те проекты, которые в Европе окупятся за 1 год, у нас — порядка трех лет. При этом один промышленный робот обходится от 5 млн до 10 млн руб».
Цифровизация экономики требует не только сокращать издержки, но и ускорять все процессы, чтобы выдержать конкуренцию. Вот почему роботы так разгоняют людей в корпорациях. Однако мы уже выяснили, что это приводит лишь к травмам, перенапряжению и текучке кадров. К тому же, слишком интенсивный рабочий график не приносит и ожидаемой прибыли — это видно по исследованию в компании Gap.
Конечно, роботы и ИИ только учатся работать с человеком, совершенствуясь с каждым шагом. Важно, чтобы это обучение и настройка не сопровождались жертвами — физическими и моральными.
В конце концов, возвращаясь к примеру Apple, роботам все же нашли отличное применение: например, один из них разбирает смартфоны на запчасти за минуту.
Подписывайтесь также на Telegram-канал РБК Тренды и будьте в курсе актуальных тенденций и прогнозов о будущем технологий, эко-номики, образования и инноваций.
Как роботы могут работать с человеком вместе (а не вместо)
В прошлом посте мы рассказали, какие проекты интеллектуальной робототехники интересны Сбербанку. Сегодня разберем коботов: историю, классификацию, как на них можно зарабатывать или использовать для решения своих задач.

Источник: Universal Robots
Часть 1. Что такое кобот
Просто назвать своего робота коллаборативным мало. Он должен удовлетворять требованиям международных стандартов, основной из которых ISO/TS 15066:2016(американский аналог ANSI/RIA TR R15.606:2016). Хотя будет правильнее сказать, что это не стандарт, а техническая спецификация. Разница есть: ISO иногда разрабатывает технические спецификации до выпуска окончательных официальных стандартов. Это признание того факта, что современное состояние коллаборативной робототехники динамично, и будет развиваться со временем.
Формат технических спецификаций нужен для фиксации состояния «здесь и сейчас», чтобы сообщество могло работать, зная при этом, что в будущем будут изменения.
Согласно ISO кобот (сокращение от коллаборативный робот) – это робот, предназначенный для прямого взаимодействия с человеком в рамках определенного совместного пространства.
Коллаборативный робот МОЖЕТ использоваться для совместной работы (ISO 10218). Совместная работа – состояние, в котором специально спроектированная роботизированная система и оператор работают в рамках совместной рабочей области.
Совместное пространство – защищенное рабочее пространство, в котором робот и человек могут одновременно выполнять задания во время производственной операции.
Скорее всего, у вас возникли вопросы:
- Станет ли робот коллаборативным, если я уберу защитное ограждение у обычного промышленного робота? Нет
- Станет ли робот коллаборативным, если я ограничу мощность и силу манипулятора? Нет, т.к. острым предметом даже с небольшой силой можно причинить ущерб человеку
- Если робот коллаборативный, это значит, что мне не нужно делать оценку рисков? Оценку рисков делать нужно.
Проще говоря, это робот, который может выполнять задачи в общем пространстве с человеком, без вреда для него, то есть нахождение человека в рабочей зоне кобота абсолютно безопасно. Отличия кобота от привычного промышленного робота:
- многие из них дешевле привычного промышленного робота: $24 тысячи вместо $40+ тысяч;
- проще устанавливать и настраивать (роботы весят порядка 30кг, нужна только розетка 220v, есть GUI);
- он гибкий, его легко переналаживать (интуитивно понятные интерфейсы программирования, не он безопасен для человека и окружения.
Раньше средства защиты людей заключались в том, чтобы отделить их от роботизированного оборудования физическими защитными устройствами, например, клетками.


Pixabay.com
Controleng.com
С появлением коллаборативных робототехнических систем эта парадигма сдвинулась: теперь можно работать вместе.


www.objektifhaber.com/aslan-gibi-dostluk-94036-haber
www.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-free
Почему это хорошо? Потому что мы получаем синергию сильных сторон робота (высокая скорость и точность при выполнении рутинных операций) и человека (творческое мышление, работа в нестандартных ситуациях). Это повышает производительность в промышленности, а значит, положительно влияет на экономику в целом.
ISO/TS 15066:2016 – это первая в мире спецификация требований безопасности для коллаборативных роботов. Документ разрабатывался комитетом (куда входили эксперты из 24-х стран и ведущих компаний-производителей) ISO c 2010 года. Он предназначен для дополнения требований и рекомендаций по совместной работе промышленного робота, описанных в стандартах ISO 10218-1 и ISO 10218-2 («Требования безопасности для промышленных роботов»), ISO/TS 15066 определяет требования безопасности для совместной работы промышленных робототехнических систем и рабочей среды. Документ дает руководство для тех, кто проводит оценку рисков при совместной работе людей и роботов.
В соответствии с ISO/TS 15066 есть 4 формы совместной работы:
- Контролируемая остановка (Safety-rated monitored stop);
- Ручное ведение (Hand guiding);
- Контроль скорости и разделения (Speed and separation monitoring);
- Ограничение мощности и усилия (Power and force limiting).
Рассмотрим каждую из них подробнее
Контролируемая остановка (Safety-rated monitored stop)
Эта форма используется, когда робот действует в основном самостоятельно, но иногда человеку нужно войти в рабочее пространство. Например, робот обрабатывает заготовку, но в середине технологического процесса человек должен сделать с ней операцию, которую не может сделать робот. Если человек войдет в заранее определенную зону безопасности – робот перестанет двигаться. При этом, питание на двигателях не пропадает – они встают на паузу. Это очень важный момент, ведь после того, как человек покинет зону безопасности, робот сразу возобновит работу. Это позволяет не терять время на полный перезапуск рабочей программы как в случае с полной остановкой робота. Если бы люди постоянно проходили мимо робота – он бы попросту не успевал поработать.
- Остановка обеспечивается без потери мощности двигателей (пауза, а не остановка).
- Оператор может взаимодействовать с роботом.
- Автоматическая работа может возобновиться, когда человек покидает рабочее пространство.
- В один момент времени может двигаться либо человек, либо робот.
- Может использоваться с обычными промышленными роботами, но нужно добавить световые барьеры безопасности (лазерные дальномеры, фотодетекторы).
Ручное ведение (Hand guiding)
Эта форма совместной работы используется для точных операций с тяжелыми объектами (например, установки дверей автомобиля). Эта форма может использоваться для работы с обычными промышленными роботами, но с дополнительным устройством, которое «чувствует» силы, которые рабочий применяет к манипулятору, как правило, это силомоментный датчик на фланце робота.
- Оператор находится в непосредственном контакте с роботом.
- Робот находится под ручным управлением.
- И человек, и робот могут двигаться одновременно (движения контролируются человеком).
- Могут использоваться обычные промышленные роботы.
- Требуется дополнительное оборудование (силомоментный датчик).
Контроль скорости и разделения зон (Speed and separation monitoring)
Здесь окружающая среда робота контролируется световыми барьерами безопасности, которая отслеживает положение людей, как и в первой форме совместной работы. Отличие заключается в сценарии: если в первой форме главная задача робота – остановка, то здесь – одновременная работа человека и робота. Поведение робота будет зависеть от заранее настроенных в его управляющей программе зон: по мере приближения человека, робот снижает скорость своих движений, а если человек подходит настолько близко, что столкновение неизбежно – происходит остановка. По мере отдаления человека, робот возобновляет работу и ускоряется.

- Скорость робота уменьшается, по мере приближения человека.
- Робот останавливается, когда может произойти столкновение с человеком.
- Человек и робот могут перемещаться одновременно.
- Может использоваться с обычными промышленными роботами, но нужно добавить световые барьеры безопасности (лазерные дальномеры, фотодетекторы).
- Используется для операций, требующих частого присутствия персонала.
Изображение: Roberta Nelson Shea – «ISO/TS 15066 Introduction»
Все три описанные выше формы совместной работы могут использоваться с обычными промышленными роботами, при условии наличия дополнительных устройств. Такие решения называются коллаборативные робототехнические системы. Отличие коллаборативного робота в том, что он может не использовать дополнительные (внешние) устройства обеспечения безопасности – они уже встроены в него. Еще одно важное отличие коллаборативных робототехнических систем от коллаборативных роботов состоит в том, что при совместной работе исключается контакт с человеком. А вот коллаборативный робот может контактировать с телом человека без вреда для него. Это достигается за счет ограничения мощности и усилия.
Ограничение мощности и усилия (Power and force limiting)
Большинство людей, представляя кобота, имеют ввиду робота, который использует именно эту форму совместной работы. Поэтому рассмотрим ее подробнее.
В «суставах» робота находятся силомоментные датчики, которые могут определить факт столкновения с человеком. Если датчики обнаруживают превышение допустимых усилий, робот останавливается. Эти роботы также предназначены для рассеивания сил на широкой поверхности, в случае удара – именно поэтому детали их корпуса чаще всего сделаны с округлыми формами. Функционал по ограничению мощности и силы, как правило, входит в штатное ПО.
- Сила и мощность робота контролируются так, что случайный контакт между роботом и оператором не причинит вреда.
- Человек и робот могут перемещаться одновременно.
- Возможные меры по снижению риска:
— факторы конструкции робота (например, округлые формы, податливые материалы);
— подходящий выбор приложений и конструкция ячейки робота (например, захват, заготовка, траектория движения и т. д.).
2. Коботы проще в настройке: не обязательно уметь программировать. После одного дня обучения рабочий сможет настроить робота для выполнения задач средней сложности. Можете попробовать сами. То есть, не нужно нанимать сервисных инженеров или системных интеграторов -> снова снижается порог входа для МСБ.
3. Коботов проще перемещать: они легче, чем промышленные, им не нужна локальная инфраструктура в виде клетки -> привлекательность для МСБ повышается, так как можно быстро переналадить производство.
4. Повышение стоимости ручного труда из-за старения населения и уменьшения числа трудоспособных людей (ставка рабочего в час: €40 в Германии, €12 в США, €11 в восточной Европе и €9 в Китае. Стоимость работы кобота $6/час).
5. «Решоринг» синергия предыдущих факторов приводит к тому, что США и ЕС возвращают производство из Китая к себе на родину. Это может способствовать сокращению расходов на морскую логистику и повышению качества продукции.
6. Государственные программы, направленные на автоматизацию и роботизацию производства. Они могут стимулировать и поддерживать (в том числе финансово) приобретение и использование роботов:
— «Industry 4.0» в Германии;
— «Made in China 2025» в Китае;
— «National robotics initiative 2.0» в США.
Часть 4. Кто производит коботов
Скачать таблицу
Часть 5. Как на коботах можно заработать и как их использовать для решения своих задач
Как заработать на коботах:
В статье использован перевод следующих публикаций:
Железное касание: стоит ли доверять роботам — Будущее на vc.ru
Синергия человека и роботов только набирает обороты. Однако сфера этики взаимодействия — пока еще в стадии изучения. Вместе с экспертами разбираемся в материале Selectel, что ждет нас в будущем в области human-robot collaboration.
«Вместо» или «вместе»? В случае взаимодействия человека с роботами пока, к счастью, лидирует второе, о вытеснении людей роботами из разных профессий речь не идет. По крайней мере, об этом говорят современные исследования в области human-robot collaboration, а также зарубежные и отечественные эксперты. Этические вопросы работы с роботами и искусственным интеллектом озадачивают и ученых, и даже Папский престол. Попробуем разобраться вместе с деканом факультета инфокоммуникационных технологий ИТМО Александром Капитоновым и кандидатом технических наук Владиславом Громовым.
Робот помогающий
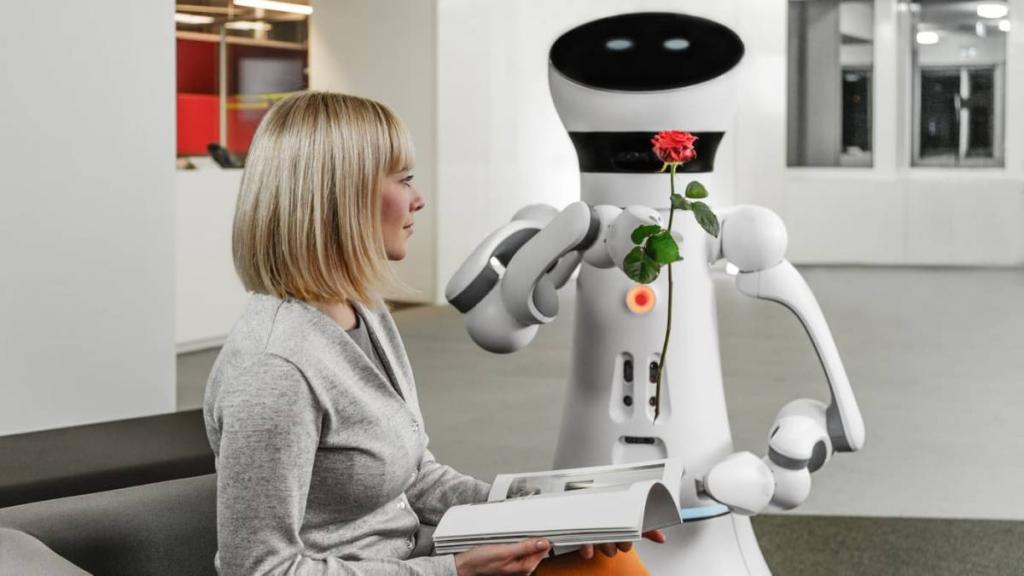
В городе Аугсбург (Германия) компания KUKA Robotics проводит исследование совместно с Университетом прикладных наук для спорта. В рамках проекта RoSylerNT они изучают взаимодействие человека с роботом-помощником при переноске грузов. Фокус — на психосоциальные аспекты, такие как восприятие технологий людьми, которые работают с роботом, страх перед ними и формирование доверительных отношений.
Роботизированная система, созданная KUKA, представляет собой подвижную автономную платформу и двух роботов LBR iiwa. Участники эксперимента — 15 тестировщиков в возрасте от 18 до 49 лет. Основная их задача: взаимодействовать с роботом и описывать свой опыт.
В робота «вшиты» датчики и технология компьютерного зрения, также он оснащен планшетом, который позволяет ему коммуницировать со своим партнером с помощью визуальных сообщений. Как отмечают участники эксперимента, эти сообщения помогают легче понимать действия робота и работают на установление доверия в паре «человек-робот». Также LBR iiwa персонально приветствует своего партнера благодаря встроенной системе распознавания лиц.
«После недолгого периода привыкания я быстро поняла, как робот реагирует на меня, что он может делать, а что – нет. Например, вскоре я выяснила, что у него нет склонности к резким движениям», — рассказывает одна из участниц эксперимента.
Ориентироваться на местности роботизированной системе помогают подгруженные карты окружающего пространства и фотобаза. Робот способен распознавать позу, движения, анализировать нагрузку человека и подстраиваться под него в конкретной ситуации. Это необходимо не только для эффективного взаимодействия, но и для защиты от случайных травм при работе с роботом.
Исследовательский проект продолжится до конца 2021 года. Разработчики планируют получить самообучающуюся роботизированную систему, которая стала бы полноценным интерактивным помощником человека. Несмотря на внимание к психосоциальному аспекту исследования, кураторы проекта также заинтересованы в разработке инноваций, которые легли бы в основу других роботов KUKA.
Как отмечают в компании, сотрудничество с роботами приобретает все большее значение, а в промышленности люди и интеллектуальные машины все чаще работают в непосредственной близости друг от друга.
Александр Капитонов
Декан факультета инфокоммуникационных технологий ИТМО, прогрессор проекта Airalab
Инициатив в области так называемого human-robot collaboration сейчас немало. Особенно они развиваются в европейских странах. Бизнес здесь анализирует роботизацию с разных аспектов: социальных, экономических, психологических. Исследование KUKA Roboter — один из примеров. Хорошо себя тут проявила и компания BMW. Немецкий производитель автомобилей в свое время обязался перед сотрудниками предоставить им другую работу, если в результате автоматизации их заменят на роботов.
Human-robot collaboration — про двустороннее сотрудничество. Мы конструируем и обучаем роботов так, чтобы они работали с нами, не принося вреда. Роботы, в свою очередь, также влияют на трансформацию пространства вокруг нас. Самый яркий пример — то, как люди начали переосмыслять дизайн интерьера квартир, чтобы робот-пылесос мог автономно и без сбоев выполнять свою работу.
Имеет право
Германия — одна из первых стран, которая начала разрабатывать широкую программу роботизации и автоматизации промышленности, с 2006 года. Вскоре этим вопросом заинтересовались в Евросоюзе. В 2013 году был запущен проект SPARC, посвященный развитию и финансированию робототехники.
Проект не заканчивается, и в эти дни, с 23 по 25 ноября, в Боснии и Герцеговине под эгидой SPARC проходит ежегодная European Robotics Week 2020. Главная тема — «Робототехника для человечества». Неделя посвящена влиянию робототехники и технологий на повседневную жизнь, экономику и здоровье в разрезе пандемии COVID-19.
В целом, крупных мероприятий, посвященных роботизации и взаимодействию человека с роботами, немало. Так, конференция ACE (International conference on future applications of AI, sensors, and robotics in society) — в 2021 году пройдет в 15-ый раз. По ее итогам выпускается Journal of Future Robot Life, затрагивающий целый спектр тем — от эмоций и этики роботов до взаимодействий с секс-роботами.
Этические принципы работы искусственного интеллекта волнуют даже Папу Римского. Последний «громкий» документ, регламентирующий отношения с AI, был представлен 28 февраля 2020 года в рамках научного форума по ИИ, организованного Папской академией защиты жизни. Согласно документам, искусственный интеллект должен уважать неприкосновенность частной жизни, работать надежно, непредвзято, прозрачно и «учитывать потребности всех людей». Свод этических принципов поддержали Microsoft и IBM.
Что в России
В России также есть некоторые подвижки к созданию безопасной цифровой среды и системе ее правового урегулирования. Как минимум важность этой задачи была отмечена президентом в сентябре этого года на 75-ой сессии Генеральной Ассамблеи ООН.
В целом, в роботизации страна пока уступает другим: промышленных роботов используют мало. По последним данным (совместное исследование Минкомсвязи РФ с Национальной ассоциацией участников рынка робототехники), плотность роботизации в России в 2018 году составила 5 роботов на 10 000 рабочих. Для сравнения, средний показатель по миру за тот же период составил 99 роботов. В Китае плотность роботизации находилась на отметке в 140 роботов, в США — 217, в Японии — 327, в Германии — 338. Мировые лидеры — Южная Корея (774 робота на 10 тыс. рабочих) и Сингапур (831 на 10 тыс. рабочих).
Впрочем, как бы ни была мала интеграция роботов в жизнь страны, о том, как вводить их в правовое поле, тоже задумываются.
«Первой ласточкой» стала концепция закона о роботах, разработанная сооснователем Mail.Ru Group Дмитрием Гришиным в 2016 году. Законопроект не приняли, однако в результате появилась Автономная некоммерческая организация по содействию развитию робототехники и инновационных технологий «ПравоРоботов». Именно на нее возложена роль ключевой отечественной площадки подготовки законодательных инициатив в области цифровой экономики.
Вопрос о месте роботов в правовом поле время от времени всплывает в новостной повестке. Так, в 2019 году в постановление Правительства РФ были внесены изменения в ПДД «О беспилотном транспорте». А недавно Институт прогрессивного образования обратился в Минфин с предложением ввести налог на роботов, а собранные средства направлять в специальный Фонд переподготовки уязвимых профессий. Предполагается, что налоговые отчисления будут сопоставимы с 13% НДФЛ со средней зарплаты в определенной профессии. По прогнозам, в течение 10–15 лет в стране без работы могут остаться 20 млн человек.
Робофобия — страх перед технологиями и иррациональная ненависть к ним — уже обросла культурным контекстом и стала объектом исследований по всему миру. В заключение спросили у экспертов, стоит ли напрягаться, если вашим «соседом по цеху» вдруг стал молчаливый промышленный контроллер.
Кандидат технических наук, доцент ИТМО, взаимодействует с роботом KUKA в исследованиях и при обучении студентов
Если обсуждать вопрос взаимодействия робота и человека, основная задача, которая стоит перед разработчиками, — это обеспечение безопасности. Именно она имеет первостепенное значение при разработке ПО. Отчасти из-за этого некоторые производители промышленных роботов ограничивают доступ к API робота, чтобы кастомные изменения в его функционале не повлекли за собой неприятные последствия для человека. Если в результате изменений робот травмирует человека, производитель может понести ответственность либо как минимум получить нелестную огласку в СМИ. Процесс согласования и испытания новых алгоритмов с точки зрения безопасности остается критически важным. Поэтому внедрение больших промышленных роботов — процесс очень долгий и трудоемкий.
За последнее десятилетие робототехника шагнула далеко вперед, и это связано с ростом вычислительных мощностей. Большинство производителей сейчас выпускают роботов c промышленными контроллерами, которые способны производить сложные вычисления достаточно быстро. Роботы обзаводятся системами компьютерного зрения, могут обрабатывать большие данные — без дополнительных вычислительных устройств. Тем не менее, в данном случае развития технологий все равно недостаточно, чтобы роботы повсеместно подключались к выполнению сложных задач — с участием человека или без оного.
Почему? Искусственный интеллект недостаточно развит, чтобы давать стопроцентную гарантию достижения поставленных перед ним целей. Алгоритмы глубокого обучения, хотя и в разы лучше, чем несколько лет назад, все равно дают погрешность в распознавании объектов. Поэтому, когда речь идет о сложных задачах, да еще и с участием человека, на ИИ лучше не полагаться — могут быть жертвы. В этом случае методы классического адаптивного управления, такие как силомоментные вычисления, дают более гарантированный результат работы.
Главная задача промышленных роботов — сделать так, чтобы человек не выполнял тяжелую или рутинную работу. Мало кто получает удовольствия от монотонных, повторяющихся изо дня в день действий. Время работников, закручивающих колпачки на зубной пасте, прошло. Обычно люди понимают, что роботы появляются на производстве для того, чтобы облегчить их работу и не повлиять на качество результата. Им остаются более сложные задачи, не описанные в строгих алгоритмах. И так человек по-новому переосмысливает свое участие в производственных процессах.
Важно также понимать, что полное исключение человека из производственных процессов — это дорогостоящая процедура, для малых и даже средних предприятий она не подойдет. Поэтому работа «в паре» становится более реальной перспективой ближайших лет. В таком случае часть действий робот выполняет с участием человека. Например, последний вручную доводит робота до точки старта работы.
Поэтому так активно начали развиваться алгоритмы взаимодействия с человеком. Без них робот либо некорректно выполнит свою работу, либо травмирует своего «партнера» (потому что не сможет определить, где он находится).
Декан факультета инфокоммуникационных технологий ИТМО, прогрессор проекта Airalab
Эксперты сходятся во мнении: как бы быстро ни развивались технологии автоматизации, они скорее будут помогать человеку, усиливать его компетенции, облегчать работу, но не исключат его из процессов полностью.
Практически в любой стране есть отрасли, автоматизировать которые слишком дорого или нерационально. Дешевле и эффективнее работают люди. Кстати, если вы волнуетесь из-за конкуренции с роботами, можно проверить свою профессию на сайте Will robots take my job. Здесь рассчитывается вероятность, с которой вас на работе заменят роботы и/или искусственный интеллект. Все прогнозы основаны на данных. Учителя и юристы могут не волноваться — вероятность замены роботами минимальна. А вот таксистам и дальнобойщикам стоит подумать о будущем — риск потерять работу из-за технологического прогресса составляет 89%, хоть и не в ближайшее время. Точные сроки сейчас назвать сложно, но это произойдет, как только человечество будет готово менять устоявшиеся форматы жизни.
IT –век и новое дворянство: когда робот будет работать вместо меня? (спойлер: уже работает)
Пока ученые тренируют искусственный интеллект писать музыку и играть в шахматы, офисные рабы ждут, когда уже можно будет оформить кредит на головастого робота и послать его вместо себя за чипсами в магазин. Или попросить зайти за ребенком в детский садик. Или избавить толчок от засора. Роботу все равно, а у человека вообще-то чувства.
Во всех смыслах это звучит чудесно: ешь, люби, молись, а железки пусть считают сальдо и выполняют план по продажам овощерезки нового поколения. Лет через пятнадцать –двадцать мы добьемся полноценного ИИ человеческого уровня. Земной рай с просмотром «Игры престолов» в режиме нон-стоп скоро наступит! Жить будет лучше и веселее!
Только вот к этому ли ведет технический прогресс?
Мода на железных и умных
Умный дом, умный светофор, умный пылесос. К работникам это тоже имеет отношение. Не важно, что вы делаете – моете машину? Робот будет мыть их лучше вас. Верстаете сайты? Робот будет верстать быстрее и качественнее. Отвечаете на звонки по телефону? Понятно, что и здесь робот вас обгонит.
На самом деле все даже хуже. Давайте откровенно: работники мы с вами вообще не очень. Мы опаздываем, отпрашиваемся к врачам, берем отпуска, впадаем в депрессии и устаем. Роботы не просто будут выполнять человеческую работу в разы качественнее, но и компаниям обходиться дешевле. Это ключевые показатели для бизнеса. Поэтому он, по мере возможности переходит на автоматизацию. При этом мы с вами не признаем тот факт, что уже теряем рабочие места из-за робота: ИИ же пока официально не существует. Ничего особенного как бы и не произошло.
А тем временем оператора на телефоне заменяет приятный во всех отношениях бот-консультант, у которого нет ПМС, вместо пропитого лица кассирши в «Ашане» — роботизированная касса. Все это не очень сильно помогает и той и другой лежать на диване в свое удовольствие. А в очень близкой перспективе они вообще могут этом диване остаться просто по причине невостребованности.
Это не очень похоже на золотой век, правда? И это только начало.
Лечь на диван уже сейчас?
Исследователи из Оксфордского и Йельского университетов в мае 2018 года провели опрос-исследование среди 352 экспертов в области ИИ, посвященное тому, когда, по их мнению, машины превзойдут людей по большинству показателей. Похоже, что время торжества ИИ приближается стремительнее, чем можно было бы себе представить: прогноз чисто технической возможности замены ИИ водителя грузовика — 2027 год, в 2049 – писателя и журналиста, в 2053 – хирурга.
Гипотетически не так уж и долго ждать, когда мы все лишимся работы. Даже если ИИ создаст новые профессии, большинству из нас это не поможет. Назовите любую работу — робот выполнит ее лучше человека. А значит вкладываться в людей особого смысла нет.
Первыми на очереди к уничтожению будут рутинные задачи. Такие, которые многие компании уже сейчас решают, заменяя на робота на человека или программу: банковский операционист, консультант, приемщик заказов, диспетчер такси. Далее следует простой физический труд, который так же подвергнется автоматизации: фасовщик, носильщик, вахтер, смотритель, охранник.
Все эти профессии не требуют супер-способностей или развитого мозга. То есть роботы лишат заработка людей еще до того, как ИИ научится хорошо считать, держать скальпель или принимать ответственные решения. А вот дальше в опасности уже люди с образованием – бухгалтера, журналисты, аналитики, рекрутеры и сложные рабочие профессии – водители, почтальоны, курьеры.
Ок, гугл, мне нужна помощь!
Есть и хорошие новости. Например, машинами нужно будет управлять, обучать, контролировать и чинить. Во всяком случае, в ближайшем будущем. Так что, если вы еще не полюбили технику, то будет не лишним развить в себе это чувства. Новые профессии типа «Учитель ИИ» или «Оператор ИИ» потребуют усердия и выносливости. Впрочем, любить людей тоже будет не лишним – ведь какая-то их жалка кучка все равно переживет нашествие компьютеров. А может быть вы поладите и с теми и с другими и сможете быть переводчиком человеческого языка на машинный и обратно.
Развитие креативности – это полезный навык. Творцы придумывают, а вот для исполнения нужно что-то попроще. Придумать робота-барбешопера должен кто-то уметь, когда настанет время. Впрочем, так же как и научить машину писать гитарные рифы. Если это будете вы – то, может быть, ваша жизнь сложится более успешно, чем у медицинского регистратора или киномеханика, который вымрут в ближайшие 5-10 лет. Кроме того, придумывать апокалипсические секты, сочинять про акции «МММ» и наполнять всемирную сеть мемасами про роботов – тяжелый, но благодарный труд. В общем, вы поняли.
По сколько работать на дядю в скором времени не будет получаться, так как дядь на всех просто не хватит, есть смысл самим стать властителем роботов. Открыть ресторан китайской кухни с механическими-поварами и железными официантами. Или запустить мастерскую по ремонту роботов-нянек. Или стать коучем среди роботов-продажников. Как видите – бизнес-идей может быть куча. Скучно точно не будет.
От прошлого к будущему
Начну со ссылки: если вы не видели, непременно посмотрите диафильм «Москва в 2017 году», нарисованный в 1960 году. Там показывали атомные поезда, полёты к системе Альфа-Центавра, подземный город прямо под Заполярьем и реку Енисей, повёрнутую против естественного течения. И, конечно, победу коммунизма и даже смерть последних империалистов. С одной стороны, нельзя сказать, что всё так и получилось, с другой — с 1960-го года многое поменялось. Но не так, как думали создатели диафильма. Эту ошибку можно назвать «ошибкой футуролога» — мы продлеваем в будущее сегодняшние события (появились роботы и нейросети), надежды (скоро они смогут чесать нам спину и рубить дрова) и страхи (что же будем рубить мы). У таких рассуждений есть известная эвристическая ценность, но всё-таки ошибочно было бы думать, что они имеют отношение к предсказанию будущего.
Я хочу вспомнить две истории из недавнего прошлого — клонирование и электронные книжки. Когда в 1996 году в Шотландии из составных частей клеток трёх овец получили овечку Долли, мир говорил только о клонировании. Предсказания были самые разные — что клонируют всех и вскорости, что клонируют только богатых, что из останков великих людей сделают их клоны, а «простых» клонировать не будут. Как мы видим, ничего из этого не случилось. Механизм клонирования продолжают дорабатывать, он занял своё место среди экспериментальных биологических методов.
Похожая история была с электронными книгами — когда появились iPad и Amazon Kindle, многие предсказывали скорую и безболезненную смерть бумажной книжки. Действительно, кривая роста продаж электронных книжек в Америке шла вверх под 45 градусов. Однако, кривая доросла до 22% — и всё. Сейчас продажи устроены так: 18%-21% электронных книг, а остальные — на бумаге.
Причины этих событий надо изучать (и есть много литературы по каждой из двух историй) — но понятно одно: мир устроен не линейно, новая технология не захватывает Землю за три года. Всё существенно сложнее.
Но если всё-таки хочется помыслить будущее — стоит оглянуться по сторонам и попробовать понять, что есть уже сейчас. Я бы предложил выделить три больших истории: 1) компьютеризация и интернетизация 2) программируемые механизмы разных форм и размеров, которые используют на производстве и 3) нейросети — самообучающиеся системы, способные выдавать результат, отличный от первоначальной программы. Всё это очень проблемные штуки. Давайте разберёмся с каждой по очереди.
Я бы хотел сразу перейти к механизмам, потому что страхи по поводу распространения компьютеров и сокращения числа бухгалтеров вроде бы уже позади. С механизмами дело обстоит так — оказывается, они не могут работать без людей. Ещё две истории: Илон Маск и японский отель.
В 2017 году Маск решил автоматизировать сборку автомобилей Tesla 3, причём радикальным образом — уволить сотрудников и оставить только роботов. Через год он признал, что так не получается. «У нас была сумасшедшая, сложная сеть конвейерных лент, и она не работала — сказал Маск. Действительно, конвейер нуждается в человеке, который чинил бы его, обслуживал и иногда оптимизировал работу системы конвейеров. Если вы откроете любую книжку о заводской жизни, странице на тридцатой вы обязательно найдёте реплики рабочих о том, что руководство не представляет себе, как на самом деле работает производство, и поэтому задачи всегда какие-то идиотские. Приходится самим, вот этими вот руками, придумывать, как сделать всё оптимально, быстро и по-умному.
В Японии есть отель Henn-na Hotel, «странный отель». Российские СМИ писали о нём два раза — в 2015м году, когда отель открылся и сразу заявил, что значительную часть обслуживающей работы будут выполнять роботы, а не люди. И в 2019м, когда администрация гостиницы решила «сократить» половину роботов. Оказалось, что справочная машина плоховато понимает обращённые к ней вопросы (кто пробовал говорить с Siri, тот знает, как это бывает неудачно), робот на ресепшне не умеет пользоваться ксероксом, а роботы-носильщики обучены ездить только в 24 номера из 100. Хуже того, робот-будильник, умевший отвечать на вопросы, распознавал храп постояльцев как вопрос и будил их ответом посреди ночи. Мечты о роботе-хирурге выглядят уже не такими желанными и не такими пугающими, правда?
С нейросетями тоже непросто. Разработчики говорят, что сами не понимают, как эти штуки работают. Например, сотрудники ВКонтакте не могут объяснить, почему те или иные посты нейросеть показывает тем или иным людям — она учитывает несколько сотен едва заметных свойств профиля и поведения пользователя и подбирает материалы, которые могут показаться этому пользователю интересными. Одновременно с этим разработчики признают, что многие задачи для нейросетей пока недоступны. Один из примеров — мы уже можем запустить робота-водителя, чтобы он ездил по прямой, скажем, по трассе между городами. Но если он в городе и если ему надо сделать поворот (просто повернуть!), он не справляется, потому что не может с нужной скоростью обсчитать всю информацию, которую обсчитывает человеческий ум. Не говоря уже о «тонкой настройке» вроде такой: «тот козёл явно повернёт из своего третьего ряда, лицо у него такое, я прям чувствую; о, и правда на поворот пошёл».
Все эти истории нужны были для того, чтобы показать, что роботам ещё учиться и учиться, если они хотят составить конкуренцию человеку. И тут я хотел бы обратить ваше и своё внимание на слово «хотят». Это риторическая фигура, роботы ничего не хотят. Ни научиться поворачивать, ни забрать наши рабочие места. Они делают это не сами, а вместе с людьми. В этом, казалось бы, тривиальном соображении — наше спасение. Можно ли представить себе мир, где значительную часть рабочих, бухгалтеров, солдат и т.д. заменили роботы? Наверное, можно, хотя и не в скором времени. В конце концов, профессия конюха тоже была массовой, а теперь нет. Но можно ли представить себе мир, где работают только роботы? Совершенно точно нет. Как сейчас есть большие молокозаводы и маленькие фермы, «H&M» и множество небольших магазинов одежды, конвейерная сборка и ручная, так и в будущем сохранится разнообразие. А каким оно окажется — вопрос к нам с вами. Роботы ведь ничего не делают сами, они способны на действие только вместе с людьми. А люди — это мы.
Роботы и люди: безопасное сотрудничество
В 2008 г. коллаборативные промышленные роботы (коботы), т. е. роботы, предназначенные для физического взаимодействия с людьми в совместной рабочей среде, вызывали не более чем простое любопытство и воспринимались как нечто фантастическое. В 2012 г. на них смотрели как на экзотику, причуду, которую некоторые производители могут себе позволить для улучшения имиджа. Но уже через год отношение к ним в индустриальных кругах изменилось — их стали воспринимать как средство производства и прикидывать целесообразность их применения в тех или иных областях технологического процесса. Что касается настоящего времени, то коллаборативные промышленные роботы уже вошли в производственный процесс и прочно там закрепились. Причем их работа настолько эффективна, что многие предприятия считают, что за ними будущее.
«Совместные, или, как мы говорим применительно к робототехнике, коллаборативные приложения — это наш новый рубеж. Они действительно будут управлять не только привычными в нашем бизнесе процессами и приложениями, но и, вероятно, приложениями, о которых мы сейчас даже не подозреваем», — считает Роберта Нельсон Ши (Roberta Nelson Shea), главный технический сотрудник по вопросам стандартизации компании Universal Robots.
Аналитики из ABI Research прогнозируют, что к 2020 г. рынок коллаборативной робототехники вырастет до $1 млрд. В индустрии будет эксплуатироваться более чем 40 000 коллаборативных роботов. Однако по мере роста их популярности также возрастает важность решения такой проблемы, как обеспечение должного уровня безопасности при применении этих роботов.
Одной из самых ожидаемых технических спецификаций в области безопасного использования коллаборативной робототехники был ее релиз, выпущенный в феврале 2016 г., — стандарт ISO / TS 15066:2016 «Robots and robotic devices — Collaborative robots» (в официальном русском переводе: ISO/TS 15066:2016 «Роботы и роботизированные устройства. Объединенные роботы»). Этот стандарт является международным руководством по безопасности работы коллаборативных систем и дает подробное, основанное на цифрах наставление, так необходимое разработчикам, интеграторам и пользователям, работающим в сфере проектирования и использования коллаборативной робототехники.
Нельсон Ши говорит, что на первых порах идея использования в индустрии коллаборативной робототехники была встречена с весьма большим скептицизмом. «Изначально решением проблемы безопасности было избегание прямого контакта с роботами. Но потом тенденция изменилась: действительно, если робот с какой-нибудь деталью касается вас, но при этом нет риска травматизма, то почему бы не разрешить такой контакт?».
Люди и роботы: распределение ответственности
«Традиционно при разработке автоматизированных систем передача части их функций людям не предусматривалась. Но поскольку роботы становятся все более мобильными и постоянно расширяют свои возможности в части взаимодействия с людьми, упомянутая концепция проектирования теперь является тупиковой ветвью эволюции автоматизированных систем, — говорит Роланд Менасса (Roland Menassa), глава Центра глобальных исследований в области автоматизации компании General Electric. — Сейчас я могу разместить робота на заводе рядом с людьми, и они могут работать бок о бок».
«Мы до сих пор используем сварку и нам необходимы роботы, которые могут работать с тяжелым оборудованием и способны выполнять очень сложные технологические операции в рамках производства, — добавляет Роланд Менасса. — Но если посмотреть на производство в целом, то можно заметить: несмотря на то, что робототехника сильно ушла вперед за последние 55 лет, сейчас по-прежнему достаточно много людей работает на сборочных линиях. И это, в первую очередь, из-за проблем в различиях применяемых материалов. Например, когда мы делаем выключатели или осветительные приборы, то используем провода и гибкие материалы, которые очень трудно обрабатывать. Перед нами стоит вопрос, как внедрить автоматизацию в ручной процесс сборки для обработки столь разных по свойствам деталей».
Для обеспечения безопасного контакта с людьми были специально разработаны роботы, имеющие определенные ограничения в части мощности и максимального усилия. При этом безопасность обеспечивается либо встроенными системами безопасности, либо системами управления. Эти типы роботов обычно изготавливаются из легких материалов, имеют меньшую мощность усилия и меньший крутящий момент в суставах и могут также иметь мягкие накладки или покрытия, предотвращающие травматизм при непосредственном контакте с людьми.
Четыре подхода к обеспечению совместной безопасной работы
В соответствии с гармонизированными стандартами безопасности роботов ANSI/RIA 15.06 «Industrial Robots and Robot Systems — Safety Requirements», ISO 10218 («Robots for industrial environments — Safety requirements») 3 и новой редакцией упомянутого выше стандарта TS 15066, существует четыре подхода к безопасной совместной работе робота с человеком:
- контролируемый останов безопасности;
- ручное управление;
- мониторинг скорости и сближения с человеком;
- ограничение по мощности усилия и моменту силы.
Перечисленные подходы касаются наиболее трудно понимаемых аспектов в сотрудничестве человека и робота. Чтобы избежать путаницы, Нельсон Ши предлагает производителям рассматривать каждый из четырех методов совместной работы как часть общего сценария, а не оторванные друг от друга подходы.
В каждом случае робот и его оператор (человек) разделяют между собой общее рабочее пространство. При подходе с контролируемой безопасностью путем останова предпосылкой является то, что в таком пространстве робот или его манипулятор вообще не должен двигаться. Что касается ручного управления — многим кажется, что этот метод используется только для обучения (рис. 1). Нельсон Ши утверждает, что это не так: «Когда вы перемещаете манипулятор робота, чтобы научить его определенным задачам, это не то ручное управление, которое имеется в виду. При обучении робот не работает в автоматическом режиме». Когда для описания совместной работы используется понятие «ручное управление», это значит, что робот и человек занимают общее разделяемое пространство, но робот движется только тогда, когда он находится под непосредственным управлением человека.

Рис. 1. Если руку коллаборативного робота перемещают, чтобы его чему-то научить, то это не то же самое, что ручное управление
«В режиме мониторинга скорости и сближения как робот, так и человек могут свободно передвигаться в общем рабочем пространстве, — поясняет Нельсон Ши. — Но как только расстояние между роботом и человеком становится критически близким, робот останавливается, т. е. фактически в этом случае используется первый сценарий (контролируемый останов безопасности). В режиме ограничения мощности усилия и момента силы можно допустить прямой контакт между человеком и роботом. То, как осуществляется это ограничение, зависит как от особенностей сферы применения робота, так и от его непосредственной конструкции. В этом случае при прямом контакте робота с человеком не должно быть риска ни нанесения ему травмы, ни даже просто причинения боли».
Нельсон Ши также говорит, что в выборе методов обеспечения безопасности нет каких-либо ограничений. Можно использовать любое сочетание четырех указанных выше методов совместной работы в общей зоне, представленных в одной роботизированной системе, или даже всех четырех одновременно. Новый стандарт TS 15066 включает формулы для расчета защитного предельно допустимого расстояния при мониторинге скорости перемещения робота или его манипулятора и его сближения с человеком.
Но, возможно, наиболее интересной частью технических требований стандарта является приложение, в котором содержатся указания о том, как установить предельные уровни, т. е. выбрать допустимые значения болевых порогов для различных частей тела. Это особенно важно учитывать при разработке и использовании приложений с ограничением по мощности усилия и моменту силы. Затем данные уже могут быть экстраполированы для определения ограничений по скорости перемещения.
«Хотя в рассматриваемом стандарте есть информация об особенностях всех четырех режимов совместной работы человека и робота в общем пространстве, но наиболее интересными для нас являются данные по роботам, для которых требуются определенные ограничения по мощности усилия и моменту силы, — отмечает Жан-Филипп Джобин (Jean-Philippe Jobin), технический директор компании Robotiq, производителя адаптивных захватов для совместных роботов. — Сейчас мы видим все больше таких роботов на рынке, а раньше у нас не было четких указаний, чтобы помочь людям безопасно установить и использовать этих роботов на предприятиях — кроме стандарта ISO 10218 «Robots and robotic devices — Safety requirements for industrial robots — Part 2: Robot systems and integration»».
Первый шаг — оценка рисков
И Нельсон Ши, и Жан-Филипп Джобин подчеркивают, что основой для любой совместной интеграции роботов является оценка потенциальных рисков (рис. 2).
«Оценка риска — это самый важный аспект, — говорит Джобин. — Если вам требуется немного большее приложение усилия или момент силы, чем указано в ограничительном документе, это не значит, что это небезопасно. Данные, которые приведены в этой технической спецификации, относятся к боли, а по стандарту ISO 10218 требуется, чтобы не было повреждений, т. е. травм».

Рис. 2. При установке любой коллаборативной роботизированной системы требуется провести оценку рисков
«Есть известная разница между причинением боли и травмой, — поясняет Джобин. — Если воздействия будут немного выше указанных в требованиях ISO/TS 15066, пользователь может сам провести ряд испытаний. А уже по их результатам доказать, что использование оборудования будет безопасным и робот не сможет нанести травму и даже причинить недопустимую боль людям в определенных режимах и условиях применения конкретного робота».
Важно отметить, что основное внимание должно уделяться не самому роботу, а оценке риска его использования в конкретном применении.
«Если вы посмотрите на стандарт, то в нем редко употребляется слово «робот», — говорит Джобин. — Обычно указывается совместная рабочая ячейка или коллаборативное приложение. Это понятие включает в себя кабели, приспособления, зажимы, сам робот и его манипулятор с захватом, т. е. все то, что находится в общем рабочем пространстве робота и человека».
Развивая свою мысль, Джобин говорит, что существует весьма распространенное заблуждение о том, что если робот «изначально безопасен», то и его функционирование также будет безопасным. Однако, например, если робот работает с опасными объектами (с острыми кромками или даже режущими элементами), то тогда человек рядом с ним в безопасности не будет — без применения соответствующих защитных мер. Другим случаем является вариант, когда робот обрабатывает тяжелый объект, что может привести к травме, если этот предмет упадет или станет неуправляемым летящим объектом с определенной и часто опасной кинетической энергией.
Все перечисленные условия использовались при обеспечении безопасности коллаборативных роботов на предприятии GE Lighting, выпускающем светотехническую продукцию в компании General Electric (рис. 3).

Рис. 3. Коллаборативные роботы безопасно работают бок о бок с людьми на производственной линии, собирающей уличные светильники
Роланд Менасса рассказывает об этом подробнее: «Мы всегда проводим анализ безопасности использования робототехники именно на основе оценки конкретной выполняемой ими задачи. Если мы поймем, даже на интуитивном уровне, что существует потребность в защите, превышающей возможности робота в части ограничения его силы воздействия или крутящего момента, то мы разместим в рабочей зоне соответствующее защитное устройство, такое как световой барьер безопасности или лазерный сканер. Иными словами, предпримем все для того, чтобы снизить риск травматизма».
Технический отчет, зарегистрированный ANSI, RIA TR R15.306-2016 «Task-based Risk Assessment Methodology» («Методология оценки рисков на основе задач»), как раз описывает такой метод оценки риска, который, в свою очередь, соответствует требованиям стандарта ANSI-RIA R15.06-2012 «Safety Requirements for Industrial Robots and Robot Systems, Overview» («Требования безопасности для промышленных роботов и робототехнических систем, обзор», был обновлен в 2016 г.). На их основе можно обеспечить безопасность любых проектов.
