
Роботы стремятся к звёздам

Кроме нашего родного праздника 12 апреля — Дня Космонавтики — есть ещё целая Всемирная неделя космоса, которая длится с 4 по 10 октября. И недавно очередная статья о том, что в будущем роботы лишат нас работы, натолкнула нас на мысль поинтересоваться, а как обстоят дела с роботизацией космонавтики? Под катом — краткий обзор использования современных космических роботов.
Как гласит Википедия:
Ро́бот — автоматическое устройство, созданное по принципам распознавания, удержания и перемещения объектов во вредной и опасной средах, предназначенное для осуществления различного вида операций для производства, которое действует по заранее заложенной программе и получает информацию о положении и состоянии окружающего пространства посредством датчиков. Робот самостоятельно осуществляет производственные и иные вспомогательные операции, частично или полностью заменяющие труд человека. При этом робот может как иметь связь с оператором получать от него команды, так и действовать автономно, в соответствии с заложенной программой.
Под термин «робот» можно подвести несметное количество устройств. Причём таких, которые вы сами в жизни бы не сочли роботом. Например, банкоматы формально тоже являются «денежными» роботами: они способны автоматически, без участия человека принимать и выдавать деньги, распознавать номинал купюр, сортируя их по своим внутренним кассетам, работать с банковскими картами. Даже промышленные манипуляторы считаются роботами, хотя их функциональность в разы беднее, чем у банкоматов; но зато они двигаются и потому в нашем сознании больше соответствуют гордому званию «робота».
Роботы начали участвовать в освоении космоса раньше человека: автоматическая межпланетная станция (AМС) «Луна-1» была запущена в 1959-м (Гагарин полетел в 1961) и стала первым аппаратом, достигшим второй космической скорости и первым искусственным спутником Солнца. После «Луны-1» по сегодняшний день в космос были запущены десятки АМС, самыми знаменитыми из которых стали «братья» «Вояджеры». Пожалуй, некоторые современные спутники тоже можно считать роботами. Все планетоходы — наш и китайский луноходы, американские марсоходы — вообще чистейшей воды роботы.
Нестареющая классика
Если говорить о привычных нам категориях устройств, то из последнего, наиболее впечатляющего можно вспомнить, как космический аппарат «Розетта» привёз и высадил на комету Чурюмова—Герасименко спускаемый аппарат «Филы»:

Европейскому Космическому Агентству удалось реализовать действительно прорывной проект: впервые в истории успешно посадить на комету искусственный аппарат. «Филы» должен был закрепиться на поверхности ядра с помощью гарпунов, потому что гравитация там слишком слаба, но они не сработали, как и ракетный двигатель, который должен был прижимать аппарат к поверхности. Впрочем, «Филы» всё же сел на комету и провёл ряд исследований, включая химический анализ грунта.
В 2013-м году на Луну высадился китайский луноход «Юйту̒». Собственно, в нём самое примечательное то, что он: а) китайский; б) первый луноход за более чем 40 лет, прошедших с окончания работы советского «Лунохода-2». При запланированных трёх месяцах активной работы «Юйту» перестал двигаться через два. Правда, он не сломался окончательно, а простоял больше двух лет, время от времени выходя на связь. Утверждается, что с помощью «Юйту» удалось обнаружить новый тип лунного грунта.
Что касается российских планетоходов, то «Луноход-2» (1973) стал последним нашим реализованным проектом. Также сегодня существуют планы по созданию спускаемых аппаратов «Луна-25», «Луна-27» и «Луна-28». Первый предназначен для обкатки технологий, второй будет анализировать пробы грунта на месте, а третий должен привезти на Землю лунный лёд.



В рамках того же проекта Луну будет исследовать и автоматическая станция «Луна-26» («Луна-Ресурс»):

Учитывая постоянные переносы сроков и сокращение расходов на космическую программу неизвестно, полетят ли эти аппараты вообще. Современные исследовательские роботы — АМС, планетоходы — очень дороги в разработке, создании и запуске. Поэтому нередко такие проекты являются плодом международных коопераций. К примеру, программа ExoMars реализуется совместно Европейским Космическим Агентством и Роскосмосом. Первая часть — ExoMars-2016 — оказалась успешной лишь отчасти: спутник-ретранслятор Trace Gas Orbiter успешно вышел на орбиту вокруг Марса, а спускаемый модуль Schiaparelli разбился. В 2020-м планируется запустить вторую очередь программы — отправить на Марс разработанные Роскосмосом поверхностную платформу с марсоходом ExoMars. Будем надеяться, что всё сложится успешно, и планетоход российской конструкции наконец-то начнёт изучение марсианской пустыни.

Впрочем, есть надежда, что Роскосмос реализует ещё один интересный проект исследовательского планетохода, который пока носит рабочее название «Робот-геолог». Два года назад сообщалось, что по своей функциональности он будет сравним с Curiosity, который прилетел на Марс ещё в 2012-м, только «Робота-геолога» собираются отправить на Луну. Шестиколёсный луноход будет длиной около 4 м и весить около 1400 кг. Пока это лишь проект, но кто знает…

А ручки-то вот они!
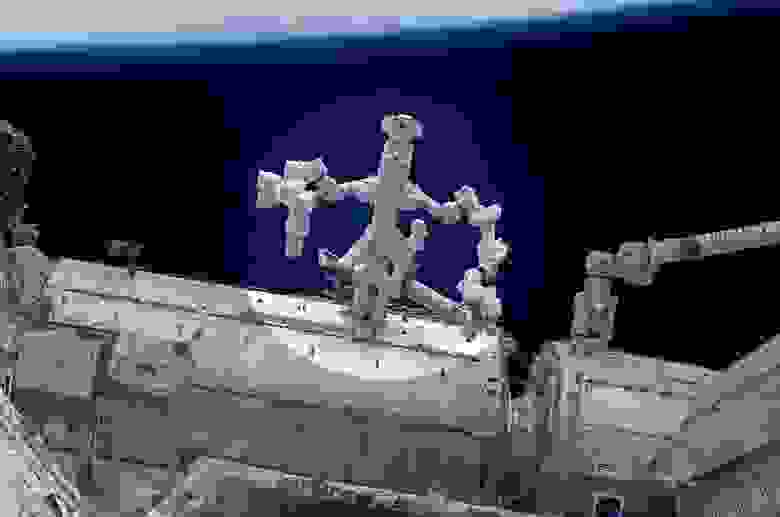
На МКС уже много лет в открытом космосе работают два робота-манипулятора: канадский манипулятор Canadarm2 с «расширением» SPDM (”Dextre”), которым можно управлять как с борта станции, так и с Земли:
… и японский JEMRMS длиной 10 м:

Роботы-аватары
Одно из самых интересных направлений развития космической робототехники — роботы-аватары. Это устройства, которыми космонавты могут управлять дистанционно, выполняя работы в открытом космосе, но при этом находясь в тепле и уюте космической станции. Дело в том, что выпускать в открытый космос человека очень дорого: каждому космонавту шьют индивидуальные скафандры, которые сами по себе стоят как несколько роскошных автомобилей, а ведь их ещё нужно доставить на станцию. Если посчитать все расходы, то каждый час работы космонавтов в открытом космосе стоит, по разным данным, $2—4 млн. При этом далеко не всегда для выполнения работ требуется особая смекалка, в космическом ремонте/монтаже/разгрузке/погрузке достаточно рутинных операций. Было бы идеально, если бы этим занимались автономные роботы, а космонавты тратили бы своё время на более важные задачи или просто больше отдыхали. Но увы, технологии искусственного интеллекта пока ещё в зачаточном состоянии, так что сэкономить деньги и время на выходах людей в открытый космос можно только с помощью роботов-аватаров.
Их разработка ведётся и в NASA, и в Роскосмосе, возможно, и в других странах. Например, в рамках американской программы Robonaut было создано несколько моделей антропоморфных роботов-аватаров. Robonaut 2 в 2011 отправлен на МКС.

В этом году завершилось инициированное NASA соревнование на разработку лучших алгоритмов управления для будущего робота Robonaut 5 (”Valkyre”), которого планируется использовать в разных миссиях агентства, в том числе в экспедиции на Марс.

Робот высотой 185 см весит 135 кг, потребляет 1,8 кВт*ч и управляется двумя компьютерами на базе Intel Core i7. Основную информацию об окружающем пространстве робот получает с помощью системы датчиков, включая пассивное стереозрение, лазерное сканирование и генерирование облака точек инфракрасного структурированного освещения (IR structured light point cloud generation). Питание робота может быть как автономным, так и по кабелю.
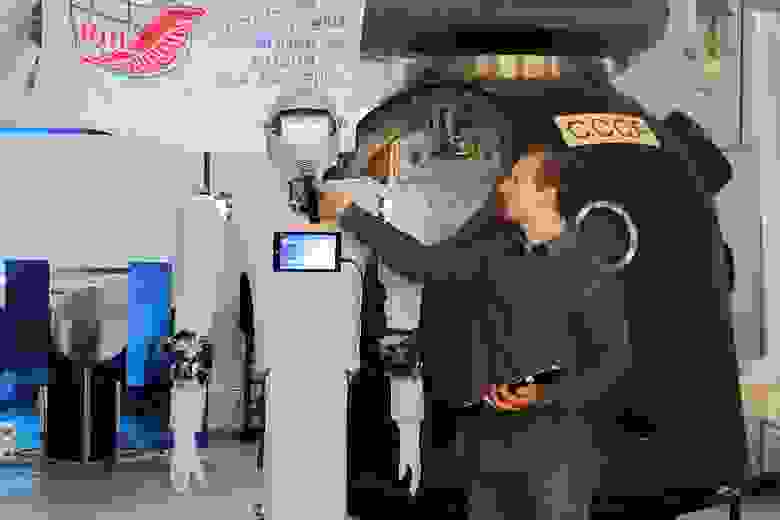
Российский антропоморфный робот-аватар SAR-400 — первый наш космический робот после 20-летнего перерыва — пару лет назад отметился в новостях, прокатившись перед президентом на квадроцикле. После наземных испытаний на полноразмерном макете модуля МКС робота планировали отправить на настоящую станцию, но отказались от этих планов. Позднее была представлена усовершенствованная модель SAR-401, которую тоже ангажируют на МКС, но не раньше 2021 года.
Также наша космическая корпорация планирует поселить на МКС «Андронавта» — робота-компаньона для психологической и информационной помощи космонавтам. Это не первый эксперимент такого рода: ещё в 2013-м на станцию привезли японского робота Kirobo, который стал, гхм, компаньоном для японского космонавта. Но если Kirobo был высотой всего 34 см и весил 980 граммов, то «Андронавт» размером со здоровенного мужика. Текущий прототип даже слишком велик для МКС, и если мы всё же отправим на станцию робота подобного назначения, то это наверняка будет более компактная модель.
Кроме того, «Андронавт» — робот двойного назначения: он может работать и в режиме аватара, управляясь человеком как со станции, так и с Земли. Предполагается использовать его для работ внутри модуля станции в случае его разгерметизации, а также для планового техосмотра в полуавтономном режиме.
Сам себе мастер
Любопытный проект сейчас разрабатывается под эгидой NASA — космический робот (”Dragonfly”) для сборки и ремонта спутников. По сути, это рука-манипулятор длиной 3,5 м, с помощью которой спутники могут самостоятельно монтировать на себе в космосе антенны и прочее хрупкое оборудование. Также Dragonfly будет использоваться для сборки в космосе больших спутников, которые слишком дорого или невозможно выводить на орбиту целиком.
Та же контора SSL, что создаёт Dragonfly, прорабатывает и проекты роботов-ремонтников для спутников — RSGS и Restore-L. Это очень актуальная проблема, поскольку срок жизни спутников не слишком велик, обычно считаные годы. Потом у них кончается топливо для маневровых двигателей или они умирают, нередко пополняя легион космического мусора, уже окутавшего планету. А с помощью роботов-ремонтников можно сэкономить на запуске новых спутников вместо сломавшихся и замедлить замусоривание околоземного пространства.
Пчелы-роботы: фантастика или реальность?
В последние десятилетия очень актуальной стала проблема массовой гибели медоносных пчел, т. н. «синдром краха колонии». Причины этого кроются не только в глобальных изменениях природного климата (аномальные снижения зимних температур), но и в массовом, часто бесконтрольном применении пестицидов, загрязнении окружающей среды радионуклидами, тяжелыми металлами, влиянии электромагнитных излучений и многих других факторах. Роль этих насекомых для сохранения экосистем нашей планеты очень велика. Прежде всего, она связана с опылением множества различных растений и культур. Исчезновение целых пчелиных семейств грозит потерей большинства видов сельскохозяйственных культур, поскольку до 80% злаков, фруктов, овощей и орехов опыляются пчелами.
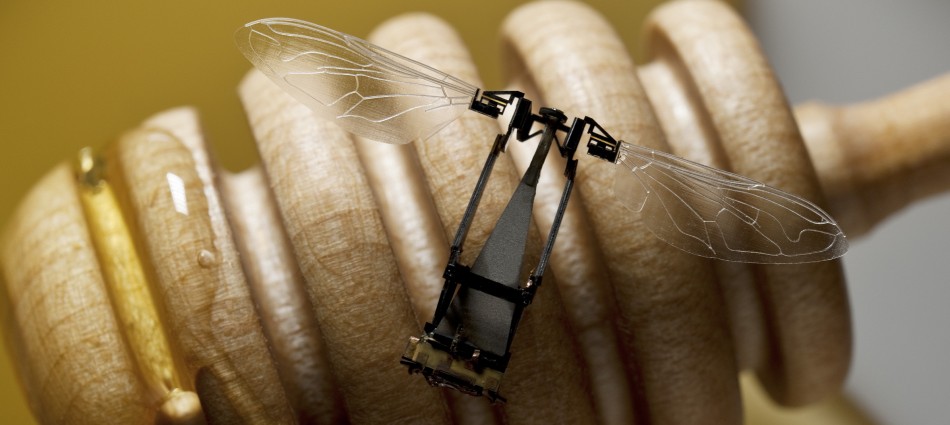
Пытаясь решить эту проблему, некоторые страны занялись разработкой моделей пчел-роботов, способных выполнять определенные функции живых пчел. Приход эры дронов помог воплощению данной задачи в реальность, а синтезированный в 2007 году японским химиком Эйнджиро Мияко ионопроводящий полимерный гель нашел свое применение в искусственном опылении и оказался лучшим материалом для сбора и переноса цветочной пыльцы.

Созданные в Японии пчелы-роботы представляют собой миниатюрные дроны размерами около 5 см, на нижней части которых находится состоящая из органического вещества (животной шерсти) клейкая поверхность, покрытая липким гелем. Как и пчелы, гель обладает позитивным зарядом и имеет свойство притягивать отрицательно заряженные частицы пыльцы. Собрав пыльцу с одного цветка, «пчела» транспортирует ее к следующему цветку.

Первые лабораторные испытания таких мини-беспилотников подтвердили их реальные возможности. Путем трех «приземлений» на цветок бамбуковой лилии (Lilium japonicum) устройство собрало около 41% пыльцы, которая затем была использована для опыления растения: из ста совершенных попыток пятьдесят три оказались успешными. Проект находится в стадии дальнейшей разработки, поскольку время нахождения дронов в воздухе пока очень ограничено, к тому же они требуют ручного управления.
Подобные разработки ведутся также в Варшавском политехническом институте. И первое поколение искусственных пчел было создано польскими учеными еще в 2014 году. Пчелы-роботы были оснащены четырьмя колесами, с помощью которых они передвигались по полю, поэтому больше напоминали опылительные машины. Тем не менее, проведенные в полевых условиях испытания (2015 г.) дали в следующем году биологически эффективные результаты (первые жизнеспособные семена, полученные путем такого механического опыления).

Сегодня группа ученых продолжает дальнейшую работу над усовершенствованием второго поколения роботизированных пчел (B-Droid), которые представляют собой небольшие квадрокоптеры, работающие автономно. Они оснащены камерами, помогающими дронам ориентироваться в пространстве посредством компьютера, который составляет для них маршрут передвижения. Аккумуляторный заряд позволяет этим робопчелам находиться в работе не более 2 – 3 минут, поэтому дроны требуют доработки. А полностью рабочие модели пчел-роботов ожидаются в течение ближайших одного – полутора лет.
О еще более значительных успехах в области создания роботизированных пчел заявила компания Walmart, подав в правительство США шесть патентов, направленных на автоматизацию фермерских хозяйств. Один из них – это создание автономных пчел-роботов, которые способны находить посевы (с помощью камер и датчиков) и самостоятельно осуществлять опыление культур, собирая и перенося пыльцу с одного растения на другое.
Вместе с тем предполагается применение подобных дронов для выявления вредителей сельскохозяйственных культур и различных видов заболеваний растений, а впоследствии, руководствуясь полученными данными, для точечного применения пестицидных препаратов с целью уничтожения этих негативных явлений, представляющих угрозу будущему урожаю.
Как вариант, фермерские беспилотные летательные аппараты могут использоваться (в массовом применении) в качестве отпугивателей птиц на посевах зерновых и других насаждений.

Одни из последних научных планов в области усовершенствования пчел-роботов – это создание бионических пчел. Учитывая достижения современных нано-технологий, предполагается возможность сканирования мозга пчел и создание на основе этого программно-информационной базы для автономных летающих роботов. Снабдив их таким алгоритмом действий, которым обладают настоящие пчелы, можно будет использовать робопчел аналогично живым опыляющим и медоносным насекомым.
Несмотря на большие возможности и широкие перспективы замены пчел образцами робототехники, ученые акцентируют внимание на том, что их изобретения служат не конкурирующей, а лишь вспомогательной силой, способной уменьшить нагрузку, приходящуюся на пчелиные семейства, сохранившиеся в природе. И хотя по многим функциям робопчелы не способны полностью соответствовать существующим опылителям, включая пчел, бабочек, различных насекомых и даже крупных животных, все же у них есть свои преимущества. Их можно использовать в условиях, непригодных для естественных опылителей. Например, для проведения опытов по опылению культур в исследовательских лабораториях. И кто знает, возможно в будущем робопчел будут использовать при создании биодома на Марсе или при организации человеческих колоний на других планетах в процессе дальнейшего освоения космоса.
Четвероногий шагающий робот меньше муравьиной головы
Насколько нам известно, самый маленький шагающий робот в мире

Несколько лет назад Spectrum IEEE уже писал о самом крохотном из существовавших тогда четвероногих роботов – размером всего в 20 мм, с высотой ног 5,6 мм и весом 1,5 гр. Его разработчик Райан Сен-Пьер из лаборатории Сары Бергбрейтер при Мэрилендском университете также продемонстрировал нам фотографию ещё меньшего по размеру робота весом всего 100 мг. Когда мы увидели всё это на конференции ICRA 2016, мы спросили Райана, не собирается ли он идти дальше по пути уменьшения:
«Всегда интересно решить задачу изготовления роботов наименьшего возможного размера, — сказал он нам. – Пока я работаю над созданием робота по той же схеме длиной 2,5 мм, что на порядок меньше представленных нами на ICRA. Роботам меньшего размера проще проникнуть в такие места, куда не пролезут большие, а разнообразие в размерах увеличивает их полезность».
Но, оказалось, что одного порядка недостаточно, и вместо этого Сен-Пьер разработал четвероногого робота в 10 раз меньше, чем планировал: он весит всего миллиграмм, и меньше муравьиной головы.
Райан отправил нам видеоролики с работающим роботом, хотя в них трудно представить, насколько он мал. Для масштаба представляйте себе муравья – он и целиком-то не особо велик, длиной всего пару сантиметров, а размеры микроробота составляют 2,5 мм × 1,6 мм × 0,7 мм. Его схема напоминает роботов с вращающимися конечностями, типа RHex, масса которого в миллион раз больше, чем у данного микрочетвероногого.
Как и его предшественники, данный робот слишком мал для использования традиционной электроники или моторов. Его ногами управляют внешние магнитные поля, влияющие на крохотные кубические магниты, встроенные в ноги. Вращающиеся магнитные поля заставляют вращаться магниты, которые придают ногам скорость вращения до 150 Гц. По-разному располагая магниты в ногах, можно добиться разных типов походки. Максимальная скорость робота составляет впечатляющие 37,3 мм/с, или 14,9 длин его тела в секунду, и, что удивительно, робот оказался довольно выносливым, пережив миллион циклов работы «без видимых признаков износа или уменьшения эффективности».
Чтобы узнать побольше, включая реальные примеры использования подобных роботов, мы пообщались по емейлу с Райаном Сен-Пьером.
IEEE Spectrum: Можно ли сравнить ваших роботов с другими шагающими роботами мелкого масштаба?
Райан Сен-Пьер: В этой работе представлен один из самых маленьких и быстрых микророботов, использующих ноги для передвижения. Есть микророботы и поменьше, но они обычно для передвижения используют не ноги. Эта работа помогает улучшать понимание динамики передвижения на миллиграммовых масштабах, как в робототехнике, так и в биологии.

Робот весом в миллиграмм рядом с головой засушенного тропического муравья paraponera clavata
В работе утверждается, что ориентация магнитов в ногах приводит к прыжковой манере движения робота. Почему была выбрана такая походка и каковы могут быть потенциальные преимущества других походок?
Походку можно задать механически, выбирая ориентацию магнитов относительно друг друга. Изначально я избрал прыжковый вариант, когда все четыре магнита направлены в одну сторону, чтобы облегчить ручную сборку и расположение магнитов. В последующих версиях я использовал движение рысью, когда совпадало расположение магнитов по диагонали. Походка оказывается важной при движении по гладким и пересечённым участкам местности, и, вероятно, при смене поверхности необходимо менять походку, но на данном этапе проекта это не представляется возможным.
Каково потенциальное применение четвероногих роботов такого размера?
Самое первое – помочь понять динамику передвижения при помощи ног на миллиграммовых масштабах, и получить более репрезентативные вычислительные и физические модели бега муравьёв. Улучшение понимания фундаментальных принципов передвижения на миллиграммовых масштабах будет полезным для разработки и управления автономными роботами такого масштаба.
А можно сделать робота ещё меньше? Каковы будут преимущества и сложности?
Однозначно возможно. Всё зависит от доступной технологии производства магнитного материала и тела робота. Но если уменьшить размер, оставив схему передачи усилий на ноги прежней, могут возникнуть проблемы. Начнут доминировать силы трения в местах сочленений, что потребует увеличения крутящей мощности для поворота ног, и уменьшит эффективность передвижения. Уменьшение размера по сравнению с текущим миллиграммом потребует изменения двигательной стратегии. Однако уменьшение масштабов без изменения схемы работы и передачи усилий даст нам идеи по поводу масштабирования наземного передвижения при помощи ног, раскроет фундаментальные ограничения на передвижение и даст идеи по поводу эволюционного давления в биологических системах.
Признаюсь, я разочарован отсутствием планов немедленно заслать этих мелких роботов внутрь нашего тела, чтобы они там бегали и всё исправляли, однако цели ближайшего времени, связанные с изучением движения роботов с ногами на малых масштабах, могут стать очень малыми шажками в этом направлении.
Работа «Созданный на 3D-принтере миллиграммовый робот с ногами, передвигающийся со скоростью 15 длин своего тела в секунду», сделанная Райаном Сен-Пьером, Уолкером Госричем и Сарой Бергбрейтер из Мэрилендского университета (которые теперь работают в Университете Карнеги-Меллона) была представлена на конференции 2018 Hilton Head Solid-State Sensors, Actuators and Microsystems Workshop, где получила награду за лучшую работу.
Квадрупеды
Квадрупед — Ходящие (шагающие) роботы
Четвероногий, четырехлапый, с четырьмя конечностями, используемыми для передвижения. Вид робота с четырьмя ногами или лапами. Зачастую это ходячий (ходящий) робот, перемещающийся с помощью ходьбы, при которой попарно или попеременно используются все четыре лапы. В отдельный случаях некоторые такие роботы могут перемещаться или хотя бы сохранять равновесие (балансировать) на трех или даже двух конечностях. В этом случае они могут использовать одну или две другие конечности для взаимодействия с предметами или инструментами. Зачастую это также роботы бионического типа, заимствующие в своем устройстве те или иные идеи из окружающей нас природы. Люди склонны наделять таких роботов свойствами животных, благодаря схожести внешних интерфейсов роботов и животных.
Примеры квадрупедов
Ковровский ВНИИ Сигнал, г. Ковров, Россия
Рысь (BPMBR400), Ковровский ВНИИ Сигнал, г. Ковров, Россия

Разработки в рамках ОКР Рысь-БП (Lynx-BP). На 2019 год назначены госиспытания.
ФПИ, Россия
Летом 2018 года в ФПИ говорят о разработках серии квадрупедов в интересах “нескольких ведомств”. Утверждается, что машины могут передвигаться по пересеченной местности. В связи с этими роботами упоминается “представитель ФПИ Сергей Хурс”. Источник: tass.ru
Италия
Технологический институт в Генуе, Италия
HyQ, Технологический институт в Генуе, Италия

HyQ – Hydraulic Quadruped. Робот способен ходить по камням, двигаться рысью, карабкаться по ступеням, перемещаться задним ходом и вставать на ноги после падения. Создателям HyQ потребуется доработать свое детище, прежде чем оно сможет принять активное участие в поисково-спасательных мероприятиях.
Китай
Norinco, Китай
Da Gou (Mountainous Bionic Quadruped Robot), Norinco, Китай
На испытаниях в Китае в октябре 2016 года можно было видеть два типа квадрупедов “бионического” типа, схожих с изделиями Boston Dynamics.
Один из них вроде бы знаком – он очень похож на Da Gou

ранее китайцы показывали “робота-собаку”.
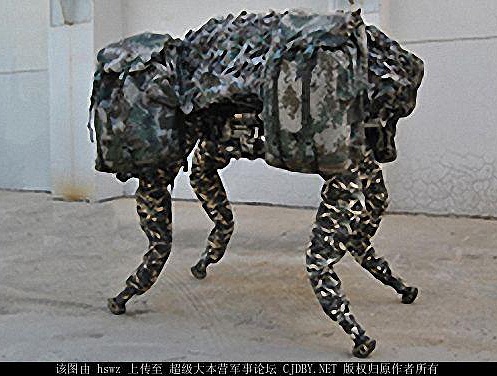
собака-робот для транспортировки грузов в горной местности
2015. Вес 130 кг, грузы весом до 30 кг, скорость до 6 км/ч, уклоны до 30 градусов. Две батареи. Продолжительность работы – не более 2 часов.
Unitree Robotics, Китай
Go1 Air; Go1; Go1 Edu, Unitree Robotics, Китай
Вес – 12 кг, скорость – до 17 км/ч, продолжительность работы – до 90 минут. Цены: $2700, $3500, $8500 в 2021 году.
Laikago, Unitree Robotics, Китай
ранний прототип квадрупеда

фото: Unitree Robotics
2020.10 Ожидаемая цена – порядка $10 тысяч или менее.
Weilan, Китай

2021.04.09 В первый месяц продаж компания реализовала свыше 1.8 тыс. систем AlphaDog по цене порядка $2.4 тыс. за единицу. Разработчики рассчитывают, что системы поддержат слабовидящих людей. В апреле 2021 года производитель указал цены в диапазоне от $5.69 тыс. за AlphaDog C100 до $27.69 тыс. для AlphaDog E400L.
AlphaDog C100
Грузоподъемность: 5 кг
Время работы: 2.5 часа
Размеры: 48х30х40 (длина, ширина, высота)
AlphaDog C200
Грузоподъемность: 5 кг
Время работы: до 5 часов
Размеры: 48х30х40 (длина, ширина, высота)
AlphaDog C300
Грузоподъемность: 5 кг
Время работы: до 5 часов
Размеры: 67x32x40 (длина, ширина, высота)
AlphaDog E400L
Грузоподъемность: 10 кг
Время работы: до 8 часов
Размеры: 72х32х60 (длина, ширина, высота)
Xiaomi, Китай
Xiaomi CyberDog, Xiaomi, Китай
2021.08 Пока что планируется выпустить 1000 таких устройств. Вычислительная платформа – американская NVidia Jetson Xavier NX – 384 ядра CUDA, 48 тензорных ядер, 6 процессоров Carmel и два ядра, выделенных под глубокое обучение. Информацию платформа получает от 11 датчиков и нескольких камер. На платформе можно размещать до 3 кг полезной нагрузки, скорость движения робопса – до 3.2 м/c. Стоимость – заметно ниже, чем у американских “собак”, 9999 юаней или $1542
Производитель неизвестен, Китай
Шагоход Пешеход номер 1, Китай

США

Квадрупед (робот “Большая собака” или робот-мул), робот-вьючное животное, первоначально спроектированный в интересах военных, которые рассматривали его в качестве прототипа роботизированного вьючного животного для военных. В конце 2015 года был признан негодным для использования в армии из-за чересчур шумного дизельного двигателя.

2015.09.24 В США проведены испытания действуюшего прототипа.
SpotMini, Boston Dynamics, Япония

WildCat, Boston Dynamics, Япония
Робот “дикий кот”.
Робот с гидравлическим приводом от двигателя внутреннего сгорания. Способен бежать быстрее, чем средний человек. Уступает в скорости роботу-гепарду Cheetah, также разработке Boston Dynamics.
название неизвестно, Boston Dynamics, США

Полезная нагрузка до 340 фунтов.
Ghost Robotics, США
Ghost Minitaur, Ghost Robotics, США

Робот The Ghost Minitaur умеет перемещаться на четырех “ногах”, бегать, прыгать, карабкаться по ступеням и даже заборам. Интересна, в частности, цена новинки – всего $1500. Разработан в спинофе Пенсильванского университета США – Ghost Robotics. Подробнее по ссылке.
V60 Q-UGV v4, Ghost Robotics, США

2020.09.08 ВВС США испытали “роботов-собак” V60 Q-UGV v4 компании Ghost Robotics в качестве охранников авиабазы.
MIT, США
Cheetah 2, MIT, США
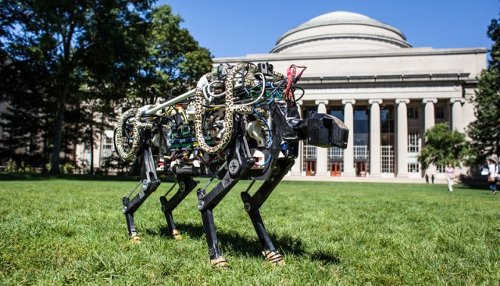
Робот-гепард. В мае 2015 года сообщается, что эта разработка MIT для DARPA научилась автономному бегу с препятствиями, впервые для четырехногих роботов. Видео .
Cheetah3, MIT, США
Показан в июле 2018 года. Может прыгать и галопировать даже на травяной лужайке, карабкаться по лестнице, ступени которой покрыты строительным мусором, быстро восстанавливает баланс после того, как его толкнули.
Mini Cheetah, MIT, США
Робот весом 9 кг, умеет нагибаться, широко разводить “лапы”, двигаться боком. По неровной поверхности робот может двигаться вдвое быстрее, чем человек, движущийся со средней скоростью. Робот может бежать со скоростью 2.45 м/c. Разработан в Лаборатории биомиметики и робототехники при MIT. Это первый четвероногий робот, выполнивший обратное сальто.
2019.11.06 В MIT вывели на прогулку сразу 9 квадрупедов “мини гепард”. Видео
NASA, США
RoboSimian, NASA, США

Разработка команды Robosimian (NASA Jet Propulsion Laboratory) в рамках создания прототипа робота для использования в условиях космоса или на других планетах. По другой версии – на основе данной разработки планировалось создать “робота-спасателя”. Четыре “ноги” с большим числом степеней свободы должны были обеспечить роботу возможность передвижения по лестницам, преодолевая ступени. Кроме того, робот должен был научиться разгребать завалы. Погиб в 2016 году из-за самовоспламенения аккумуляторов.
Европа
ETH Zurich (и ряд других компаний и университетов), Европа
ANYmal, ETH Zurich (и ряд других компаний и университетов), Европа

Квадрупед, шагающий мобильный робот, разработанный в Европе. Среди возможных “профессий” квадрупеда – участие в поисково-спасательных операциях, сбор данных в туннелях водосброса. Есть вариант с колесами на конечностях.

2020.10.18 ANYmal обзавелся колесами вместо копыт. Повысилась скорость робота, особенно на ровных участках поверхности, а также его пробег до подзарядки.
Robotic Systems Lab, Швейцария
Dyana, Robotic Systems Lab, Швейцария
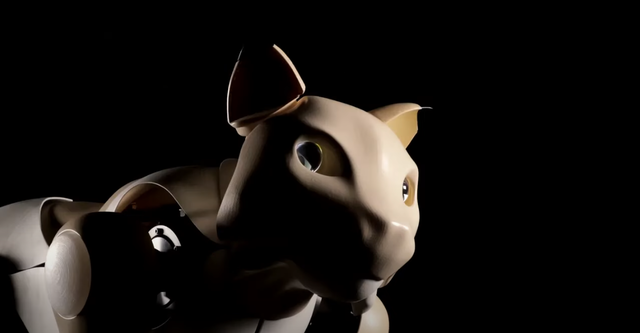
2021.06.14 Разработчики Robotic Systems Lab, Швейцария, пытаются перекинуть мостик между шагающими роботами и миром реалистичной, но не мобильной аниматроники. Проект Dyana это проект воссоздания “анимированной” рыси. Планируется готовность робота до конца 2021 года. Подробнее.
Charlie

Робот-шимпанзе для работы в космосе. Скорее четверорукий, чем четвероногий, как и положено обезъяне. Наверное все же тоже “квадрупед”.
Новости
2021.06.14 Разработчики Robotic Systems Lab, Швейцария, пытаются перекинуть мостик между шагающими роботами и миром реалистичной, но не мобильной аниматроники. Проект Dyana это проект воссоздания “анимированной” рыси. Планируется готовность робота до конца 2021 года. Подробнее.
2020.10.23 Квадрупеду Spot вернули руку-манипулятор.Благодаря этому, робот получил способность открывать двери, выдвигать ящики, переключать тумблеры. Робот может справиться даже с вентилем. Кроме того, робота научили самостоятельно вставать на подзарядку. В теории это означает заметное расширение его радиуса действия, достаточно сделать побольше пунктов подзарядки.
2020.10.18 ANYmal обзавелся колесами вместо копыт. Повысилась скорость робота, особенно на ровных участках поверхности, а также его пробег до подзарядки.
2020.09.08 ВВС США испытали “роботов-собак” V60 Q-UGV v4 компании Ghost Robotics в качестве охранников авиабазы.
2019.03.18 Инженеры MIT обучили робота Mini Cheetah обратному сальто . Робот весом 9 кг, умеет нагибаться, широко разводить “лапы”, двигаться боком. По неровной поверхности робот может двигаться вдвое быстрее, чем человек, движущийся со средней скоростью. Робот может бежать со скоростью 2.45 м/c. Разработан в Лаборатории биомиметики и робототехники при MIT. Это первый четвероногий робот, выполнивший обратное сальто.
2018.07.23 Летом 2018 года в российском ФПИ говорят о разработках серии квадрупедов в интересах “нескольких ведомств”. Названия роботов не сообщаются. Утверждается, что машины могут передвигаться по пересеченной местности. В связи с этими роботами упоминается “представитель ФПИ Сергей Хурс”. Источник: tass.ru
2017.11.14 13 ноября 2017 года Boston Dynamics опубликовали видео с новой, более гибкой версией квадрупеда SpotMini. Не так давно компания сменила владельца – материнская компания Google – Alphabet – продала BD японскому гиганту SoftBank. ТТХ робота еще не разглашались, но выглядит он эффектно.
2017.04.07 Spot получил второй шанс заинтересовать морпехов. Осенью 2017 года робота Spot вновь покажут морпехам США в рамках тестирования на предмет возможных перспектив закупки.
Создание прототипа частей модели в программе «3D’s MAX»
Печать модели на 3D принтере
Создание Аппаратной части
Итоговая сборка прототипа
Методы исследования: При Работе над проектом мы использовали: сбор материала, моделирование, конструирование, эксперимент, анализ, метод технического проектирования
Глава 1. Создание прототипа частей модели в программе «3D’s MAX»
Для создания нашего робота мы проанализировали множество вариантов конструкций четвероногих роботов и на их основе создали свою индивидуальную конструкцию.
Для данного проекта была выбрана программа Autodesk 3Ds Max. Итак, что же она умеет? В первую очередь следует перечислить основные возможности и особенности данного пакета. А именно:
1.1 3D моделирование
Основная функция программы – создание и редактирование 3D графики. Остальные опции предназначены для дополнения созданных объектов и доведения их до реалистичного внешнего вида. Программа оснащена огромным количеством разнообразных модификаторов, инструментов для работы с моделями. 3Ds Max предлагает такие типы проектирования трехмерных объектов:
Моделирование на основе примитивов. 3Ds Max содержит встроенную библиотеку стандартных объектов, так называемых примитивов. Во многих случаях создание моделей начинается именно с них, ведь к таким примитивам применимы разнообразные модификаторы;
Полигональное моделирование. Самый распространенный вид 3D-моделирования, встречающийся во многих пакетах трехмерной графики. Может использоваться для разработки моделей различной сложности;
1.2 3D визуализация
Autodesk 3Ds Max – это действительно мощная программа для визуализации. Приложение предоставляет возможность гибкого управления настройками, включая экспозицию, глубину резкости, и многое другое.
Окно Material Editor (редактор материалов) в 3Ds Max реализовано по нодовому принципу, т.е. каждая функция вынесена в отдельное диалоговое окно, за счет чего управлять материалами легко и удобно. В числе визуализаторов для программы такие модули, как Arnold, V-Ray, Mental Ray, RenderMan, FinalRender, Luxrender и многие другие.
1.3 Анимация
Анимация в 3 D ’ s Max реализована очень качественно. Анимации поддаются как целые объекты, так и отдельные их элементы. Присутствуют эффекты движения частиц (огонь, дым, брызги, снег), жидкостные эффекты. Также есть возможность детального моделирования траекторий движения объектов. Пользователь вплоть до малейших перемещений определяет путь передвижения моделей. Вдобавок ко всему, инструменты анимации можно самостоятельно создавать и редактировать, а с их помощью формировать новые контроллеры анимации в среде создания графов. Помимо прочего программа предлагает возможность видеомонтажа анимационных сцен и множество фильтров изображений.
После выбора конструкции робота была поставлена задача спроектировать 3d модель для последующей печати на 3d принтере. Для этой задачи идеально подходит программа 3d’s Max, т.к. имеет обширный список функций, а также данная программа проста в использовании. В 3d’s Max были созданы:
Задние и передние конечности:
Глава 2. Печать модели на 3D принтере
2.1 Программа для 3 D печати – Cura 3D
Для печати готовой модели была выбрана программа Cura 3 D .
Cura 3D — это программа-слайсер для 3D–принтеров, которая берет 3D–модель и нарезает ее (slice) на слои, чтобы получить файл, известный как G-Code, в котором содержатся коды, которые понимает 3D–принтер.
Существует три основных этапа подготовки файлов для 3D–печати.
Экспорт 3D–файлов. После того как вы создали модель, ее нужно экспортировать либо в STL-, либо в OBJ-файл. Эти форматы понимает Cura 3D. Они отличаются от форматов приложений для 3D–моделирования, поскольку описывают только конечную геометрию, без индивидуальных параметров и редактируемого содержания.
Экспорт файлов послойной нарезки. После этого файл STL или OBJ может быть импортирован в Cura 3D, где он нарезается и преобразовывается в послойную структуру, называемую G-Code, являющийся по сути просто текстовым документом, содержащим список команд для 3D–принтера, которые принтер читает и выполняет: это температура хот-энда, такое-то перемещение влево, такое-то перемещение вправо и т.д.
2.2 3 D Принтер и выбор пластика:
3 D модель мы печатали на принтере Geetech A10M , т.к. он обладает рядом преимуществ таких как:
1. Смешанная цветная печать с двойным экструдером
2. 220 * 220 * 260 мм размер печати
3. С детектором накаливания
4. Высокоадгезивная строительная платформа
5. Панель управления с открытым исходным кодом GT2560
6. Модульная конструкция для легкой сборки
7. 360 ° дизайн вентиляции, увеличивает рассеивание тепла
8. V-образные рельсы и колеса на каждой оси
9. Точность печати 0.1мм
Выбор пластика: Для печати мы выбрали пластик двух видов PLA и ABS , т.к. это самые доступные виды пластика.
Глава 3. Электронные комплектующие
Помимо 3д печати нам нужно было чтобы наша модель двигалась, для этого мы установили в неё электронные комплектующие представленные ниже.
3.1 Orange pi – это микрокомпьютер, состоящий всего из одной платы, но по своим характеристикам, способный тягаться с полноценными компьютерами. В нашем роботе управляет серводвигателями, также позволяет дистанционно осуществлять управление
Технические характеристики Orange Pi PC 2
Процессор : Allwinner H5 Quad-core 64-bit Cortex-A53 H.265
Графический процессор: Mali450
ПЗУ: microSD (до 64 ГБ)Б)
Ethernet: 10/100/1000Mbps Ethernet
Видео вход: 1 x CSI входной разъем камеры:
Обладает 40-пинами для подключения любых других устройств.
3.2 Сервопривод MG996R Улучшенная версия сервопривода MG995. Часто используется для установки на радиоуправляемые модели самолётов и планеров. По сравнению с предыдущей моделью обладает повышенным крутящим моментом при стандартном напряжении в 4,8 – 7,2 В. Является виброустойчивым. Именно благодаря сервоприводам наш робот может двигаться, ходить.
Характеристики сервопривода MG996R
Скорость: 0.2 с/60 о (при 4.8 V)
Рабочее напряжение: 4.8 – 7.2 V
Рабочая температура: 0 – 55 о С
Размеры: 40.7 x 19.7 x 42.9 мм
Разъём: JR (подходит к JR и Futaba)
Угол поворота: 180 градусов
3.3 Модуль PCA9685 Является 16-канальным ШИМ контроллером с управлением через I²C шину с помощью которого можно управлять 16 сервоприводами. Он позволяет используя лишь I2C шину Orange Pi управлять 12 сервоприводами.
Технические характеристики
► Напряжения питания контроллера: 3.3 или 5 В;
► Питание сервоприводов: до 5-6 В;
► Частота ШИМ: 40-1000 Гц;
► Возможность подключения 16 сервоприводов;
► Возможность подключения до 62 устройств к одной шине;
► Размер платы: 66 х 25 мм;
Глава 4. Итоговая сборка
После печати модели на 3 D принтере была произведена общая сборка устройства, внутрь корпуса были вмонтированы электронные модули, в голову была вмонтирована веб-камера.
Глава 5. Программирование
Была написана программа на языке программирования python специально для микрокомпьютера orange pc , ниже представлена часть программы.
SQuad: робот, способный пластично двигаться и преодолевать препятствия
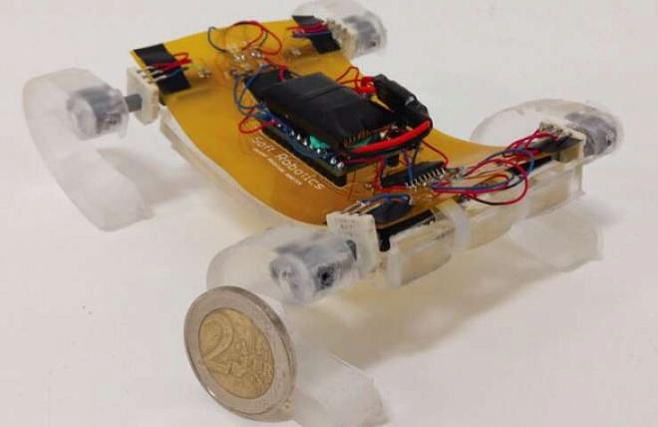
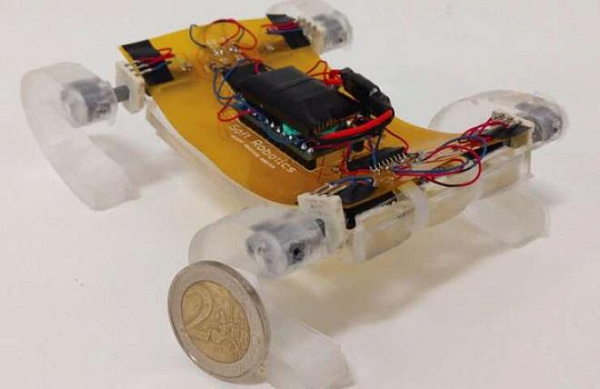
Ученые разрабатывали миниатюрных роботов последние десять лет, и, опираясь на опыт, отмечают: при том, что миниатюрные роботы имеют целый ряд преимуществ — небольшие расходы на материалы, способность роботов передвигаться в маленьких помещениях и прочие — их недостатком остается невысокий уровень двигательной пластичности и плохая маневренность. Особенно эти недостатки проявляются при передвижении робота по неровным поверхностям.
SQuad — четвероногий робот размером с ладонь — устраняет эти недостатки. Этот микроробот сделан из пластичных и легких материалов, таких как, например, полидиметилсилоксан. С-образные конечности робота позволяют ему забираться на возвышения и преодолевать препятствия, а встроенный в них электродвигатель постоянного тока отвечает за их вращение. Все это делает SQuad крайне маневренным.
Робот был протестирован инженерами на разных поверхностях и доказал свою способность в быстрой адаптации под разные ситуации и пространства.
фото: Kalin et al.

Рекомендуем






















- Главная
- Мегаполис
- Журнал
- Партнеры

- О нас
- Где купить
- Правила
- Редакция
- Рекламодателям
- Контакты

Друзья. Если вы решили зарегистрироваться в нашем Мегаполисе, то вам придется немного потрудиться и ответить на несколько вопросов. И даже постараться вставить две собственные фотки. А я понимаю, что это не просто. Ох как не просто.
Один мой приятель позвонил мне по этому поводу и стал ругаться.
Типа: «Ну зачем все так сложно? Может тебе еще и размер ботинок написать?!» На что я ему ответил: «Чтобы просто почитать, не надо регистрироваться. Заходи и читай. Мы всем рады.
А вот если после прочтения ты вдруг решишь со мной жестко поспорить, то вот тут-то надо оставить о себе немного информации. Может, даже размер ботинка. Чтобы я понимал, с кем имею дело, когда буду принимать решение – спорить ли с тобой вообще…»
Это, конечно, шутка. Но я хотел бы вам сказать, что мы не строим копию Твиттера или ВКонтакте. Они круче. Мы создаем для себя и для вас журнал. Научно-популярный журнал. Который в современных условиях должен не только писать, но и говорить, отвечать, спорить, ругаться и т.д., оставаясь при этом журналом.
Мы создаем площадку для тех, у кого есть что рассказать другим, и они не боятся это сделать. Поэтому давайте без обид. Я буду вам благодарен, если вы решитесь на этот шаг. Удачи.
Познакомьтесь с Au-Spot, собакой-роботом с искусственным интеллектом, которая будет исследовать пещеры на Марсе
Сидеть! Стоять! Принеси! Составить карту марсианской пещеры! Кто хороший мальчик? Au-Spot хороший мальчик.
Учёные оснастили четвероногих роботов, похожих на собак, искусственным интеллектом (ИИ) и набором сенсорного оборудования, чтобы помочь им автономно перемещаться по опасным скалам и пещерам на Красной планете.
В презентации 14 декабря на ежегодном собрании Американского геофизического союза (AGU), проводившемся в прошлом году онлайн, исследователи из NASA / JPL- Caltech представили робота (напоминающего собаку), который может маневрировать так, как культовые колёсные вездеходы, такие как Spirit, Opportunity, Curiosity и недавно запущенный Perseverance никогда не могли. По словам учёных из AGU, манёвренность и устойчивость новых роботов сочетаются с датчиками, которые позволяют им избегать препятствий, выбирать между несколькими путями и строить виртуальные карты пещер для операторов находящихся на базе.
Традиционные марсоходы ограничены в основном плоскими поверхностями, но многие интересные с научной точки зрения районы Марса достижимы, только в случае пересечения очень неровной местности или вообще находятся под землёй. Роботы-собаки хорошо подходят для таких задач – даже если они упадут, они смогут снова подняться.
“Падение не означает провал миссии”, – заявили учёные во время презентации. “Используя алгоритмы восстановления, робот может самостоятельно подняться после различных падений”.
Mars Dog также будет примерно в 12 раз легче современных марсоходов и сможет путешествовать намного быстрее, достигая нормальной скорости ходьбы 5 км/ч (3 мили в час). Исследователи сообщили, что марсоход Curiosity движется по поверхности Марса со скоростью около 0,14 км/ч (0,09 миль в час).
Помощь будущим колонистам
По данным НАСА, пещеры на Марсе могут стать убежищем для будущих человеческих колоний, обеспечивая естественную защиту от смертельного ультрафиолетового излучения, экстремального холода и сильных пыльных бурь, которые могут длиться неделями. Исследователи из AGU заявили, что пещеры могут также служить источником доказательств существования жизни из далёкого прошлого Марса или даже служить домом для организмов, живущих глубоко под марсианской поверхностью сегодня. Роботы, которые могут обходить скалы, опускаться в пещеры и выбирать наиболее оптимальный путь, а также собирать измерения и строить карту того, что они “видят”, могут предложить учёным новые возможности для обнаружения признаков жизни за пределами Земли.
Автономный марсианский пёс, получивший название “Au-Spot”, представляет собой модифицированную версию робота “Spot”, четвероногого механического исследователя, созданного робототехнической компанией Boston Dynamics. Более 60 учёных и инженеров в команде Collaborative SubTerintage Autonomous Resilient Robots (CoSTAR) оснастили Au-Spot сетевыми датчиками и программным обеспечением, чтобы помочь ему безопасно и автономно сканировать, перемещаться и составлять карты окружающей среды.
Au-Spot обрабатывает исходные данные от лидаров, визуальных, тепловых датчиков и датчиков движения для создания трёхмерных карт. Mars Dog также использует ИИ, чтобы узнать, каких структур следует избегать и идентифицировать объекты, которые могут представлять научный интерес, а модуль связи позволяет роботу передавать данные на поверхность, пока он исследует подземелье.
Члены команды CoSTAR тестируют Au-Spot на различных полосах препятствий, проверяя его в туннелях и коридорах; вверх по лестницам и пандусам; и на открытом воздухе, имитирующем марсианские пейзажи, например, в лавовых трубах в Северной Калифорнии. Эти демонстрации показывают, что роботы без проблем могут перемещаться по валунам и наносить на карту структуру глубоких пещер.
Эти роботы однажды позволят провести революционные научные исследования на поверхности и под поверхностью Марса, тем самым раздвинув границы возможностей НАСА в исследовании традиционно недоступных мест.
