
ТЕХНОЛОГИИ, ИНЖИНИРИНГ, ИННОВАЦИИ
Измеритель диаметра, измеритель эксцентриситета, автоматизация, ГИС, моделирование, разработка программного обеспечения и электроники, БИМ

Создано роботизированное летательное устройство, способное плавать и летать подобно альбатросу

Инженеры MIT разработали роботизированное летательное устройство, которое может парить над поверхностью воды по тому же принципу, который используется альбатросами. Кроме того, он может и плыть по волнам, не утопая. Это стало возможно благодаря удивительной предусмотрительности разработчиков, где альбатросом аппарат становится в том случае, если в исследуемом регионе сильный ветер. Лодкой — если ветра нет. В результате такая система покрывает расстояние до цели за время, в 10 раз меньшее, чем среднее судно. Устройство очень легкое и весит всего 2,7 кг. Разработчики считают, что в ближайшем будущем такие аппараты будут незаменимы в работе ученых, помогая вести наблюдение за происходящим на огромных территориях.

- Наша продукция
- Презентации по направлениям
- Инжиниринг
- Консалтинг
- Металлообработка
- Моделирование
- Разработки
«Большая часть океана пока остается вне инструментов мониторинга человека», — говорит Габриэль Буске, глава проекта. Он утверждает, что чрезвычайно важно вести наблюдение за океаном, отслеживая влияние климатических изменений. Но сделать это при помощи стандартного набора инструментов не так легко, поэтому и было принято решение разработать специализированную ситсему.
Робот использует альтернативные источники энергии вместе с традиционными. Впервые детали проекта были представлены на международной конференции IEEE в Австралии.
В прошлом году Буске со своими коллегами опубликовал исследование динамики полета альбатроса. Они определили основные принципы такого полета и выделили отдельные составляющие, которые позволяют немаленькой птице покрывать огромные расстояния с минимальным расходом энергии. Альбатрос способен на это благодаря умению использовать энергию ветра.
В процессе полета альбатрос переходит из быстрых «течений» воздушных масс в более медленные и обратно, что позволяет ему практически без затрат энергии продолжать двигаться. В случае робота, если ветер не очень сильный, он способен скользит и по поверхности воды. Чем чаще устройство (или птица) взаимодействует с разноскоростными потоками, тем быстрее скорость объекта.
Итогом разработки стало гибридное устройство, которое представляет собой автономный аппарат с размахом крыльев в 3 метра — примерно такой же показатель и у альбатроса. К конструкции было добавлено несколько элементов, которых нет у прототипа системы — например, парус. Затем ученые провели математическое моделирование процесса перемещения аппарата, и оказалось, что его показатели близки к оптимальным.
Средняя скорость системы составляет около 40 километров в час — это гораздо быстрее, чем у парусной лодки. Система оказалась весьма эффективной. Уже построен прототип, который помог сделать Марк Дрела, профессиор аэронавтики и астронавтики в MIT. В нижней части системы закреплен киль и несколько инструментов, включаяч GPS, разного рода сенсоры, системы для полета, ультразвуковой сенсор, позволяющий определять расстояние до воды.
При помощи этого сенсора ученые очень точно определяют местоположение устройства относительно поверхности моря или океана. При необходимости киль можно погрузить в воду, но дрон все равно будет двигаться вперед с достаточно большой скоростью. Как и говорилось выше, частью конструкции должен был стать парус, но затем от него решили отказаться в ходе испытаний прототипа, чтобы не усложнять задачу.
В самом начале испытаний робота испытали на реке, причем его запускали при помощи удочки. Все получилось, и достаточно быстро робот набрал скорость в 35 километров в час, оторвавшись от поврехности воды и отправившись в первый свой полет.
Удаленно можно спускать аппарат, управлять его килем, с тем, чтобы изменить направление движения. В ходе испытаний оказалось, что робот ведет себя так, как и задумано. «Мы летали очень близко к поверхности и любая ошибка могла привести к аварии. Мы все из-за этого сильно нервничали, но в то же время и наслаждались моментом», — говорит глава группы разработчиков.
На этапе proof-of-concept все прошло хорошо, так что аппарат решено было продолжать совершенствовать. Вскоре к общей конструкции должны добавить обещанный ранее парус, что позволит системе передвигаться еще быстрее. Таких «альбатросов» планируется запустить несколько, чтобы иметь возможность вести мониторинг обширных площадей морей и океанов.
Автор: Максим Агаджанов
Источник: https://geektimes.com/
- Наша продукция
- Презентации по направлениям
- Инжиниринг
- Консалтинг
- Металлообработка
- Моделирование
- Разработки
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!
Таракана-робота научили плавать и нырять

 100 лет назад
100 лет назад- 1917: моя жизнь после
- s-толком о церкви
- Аналитический центр s-t-o-l.com
- Главред говорит
- День Победы
- Дом, который тебя ждёт
- Жизнь редакции
- Жить вместе
- Календарь «Стола»
- конкурс
- Мост, которого нет
- На берегах Стикса сидели мы и плакали
- Пасха. День Победы
- Прожито для нас
- Русские картинки
- Русское застолье
- Сказки на ночь
- Стол справок
- Студенты революции
- Фотопроект
- Цвет настроения
 100 лет назад
100 лет назад 1917: моя жизнь после
1917: моя жизнь после s-толком о церкви
s-толком о церкви Аналитический центр s-t-o-l.com
Аналитический центр s-t-o-l.com Главред говорит
Главред говорит Дом, который тебя ждёт
Дом, который тебя ждёт Жизнь редакции
Жизнь редакции Жить вместе
Жить вместе Календарь «Стола»
Календарь «Стола» Мост, которого нет
Мост, которого нет На берегах Стикса сидели мы и плакали
На берегах Стикса сидели мы и плакали Прожито для нас
Прожито для нас Русские картинки
Русские картинки Русское застолье
Русское застолье Сказки на ночь
Сказки на ночь Стол справок
Стол справок Студенты революции
Студенты революции Фотопроект
Фотопроект Цвет настроения
Цвет настроенияГруппа инженеров из Гарвардского университета представила усовершенствованную версию роботаракана HAMR, способную перемещаться по поверхности воды и нырять, сообщает www.newsru.com.
Как и в предыдущей версии HAMR, которая могла бегать и прыгать, инженеры использовали для движения робота не электромоторы, которые увеличивают общую массу и усложняют управление, а пьезоактуаторы. В основании каждой ноги установлено два таких актуатора – один из них отвечает за движение ноги в горизонтальной плоскости, а другой в вертикальной.
Чтобы приспособить робота для движения по воде и под ней, учёные дополнительно оснастили его ноги односторонними плавниками, которые складываются при движении в одну сторону, но остаются в разложенном состоянии при движении в противоположном направлении. Такая конструкция плавников позволяет HAMR двигаться вперёд, находясь в воде. Помимо этого, над плавниками были установлены медные платформы с гидрофобным покрытием. Они позволяют миниатюрному роботу держаться на воде за счёт её поверхностного натяжения. Однако если приложить к платформам напряжение в 600 Вт, их угол смачивания изменится и робот начнёт тонуть.
Опустившись на дно, роботаракан сможет двигаться по нему так же, как и по суше. HARM способен выбраться на «берег», если дно будет достаточно пологим: робот может подниматься под водой по дну с 11-градусным наклоном, но возле поверхности воды поверхностное натяжение оказывает на робота сильное влияние, поэтому уже при наклоне в шесть градусов поверхностное натяжение не даёт HARM выбраться на поверхность.


60 лет назад началось строительство Берлинской стены

В день кончины архим. Тавриона (Батозского) – его проповедь на Успение
ТЕХНОЛОГИИ, ИНЖИНИРИНГ, ИННОВАЦИИ
Измеритель диаметра, измеритель эксцентриситета, автоматизация, ГИС, моделирование, разработка программного обеспечения и электроники, БИМ

Создано роботизированное летательное устройство, способное плавать и летать подобно альбатросу
Инженеры MIT разработали роботизированное летательное устройство, которое может парить над поверхностью воды по тому же принципу, который используется альбатросами. Кроме того, он может и плыть по волнам, не утопая. Это стало возможно благодаря удивительной предусмотрительности разработчиков, где альбатросом аппарат становится в том случае, если в исследуемом регионе сильный ветер. Лодкой — если ветра нет. В результате такая система покрывает расстояние до цели за время, в 10 раз меньшее, чем среднее судно. Устройство очень легкое и весит всего 2,7 кг. Разработчики считают, что в ближайшем будущем такие аппараты будут незаменимы в работе ученых, помогая вести наблюдение за происходящим на огромных территориях.
- Наша продукция
- Презентации по направлениям
- Инжиниринг
- Консалтинг
- Металлообработка
- Моделирование
- Разработки
«Большая часть океана пока остается вне инструментов мониторинга человека», — говорит Габриэль Буске, глава проекта. Он утверждает, что чрезвычайно важно вести наблюдение за океаном, отслеживая влияние климатических изменений. Но сделать это при помощи стандартного набора инструментов не так легко, поэтому и было принято решение разработать специализированную ситсему.
Робот использует альтернативные источники энергии вместе с традиционными. Впервые детали проекта были представлены на международной конференции IEEE в Австралии.
В прошлом году Буске со своими коллегами опубликовал исследование динамики полета альбатроса. Они определили основные принципы такого полета и выделили отдельные составляющие, которые позволяют немаленькой птице покрывать огромные расстояния с минимальным расходом энергии. Альбатрос способен на это благодаря умению использовать энергию ветра.
В процессе полета альбатрос переходит из быстрых «течений» воздушных масс в более медленные и обратно, что позволяет ему практически без затрат энергии продолжать двигаться. В случае робота, если ветер не очень сильный, он способен скользит и по поверхности воды. Чем чаще устройство (или птица) взаимодействует с разноскоростными потоками, тем быстрее скорость объекта.
Итогом разработки стало гибридное устройство, которое представляет собой автономный аппарат с размахом крыльев в 3 метра — примерно такой же показатель и у альбатроса. К конструкции было добавлено несколько элементов, которых нет у прототипа системы — например, парус. Затем ученые провели математическое моделирование процесса перемещения аппарата, и оказалось, что его показатели близки к оптимальным.
Средняя скорость системы составляет около 40 километров в час — это гораздо быстрее, чем у парусной лодки. Система оказалась весьма эффективной. Уже построен прототип, который помог сделать Марк Дрела, профессиор аэронавтики и астронавтики в MIT. В нижней части системы закреплен киль и несколько инструментов, включаяч GPS, разного рода сенсоры, системы для полета, ультразвуковой сенсор, позволяющий определять расстояние до воды.
При помощи этого сенсора ученые очень точно определяют местоположение устройства относительно поверхности моря или океана. При необходимости киль можно погрузить в воду, но дрон все равно будет двигаться вперед с достаточно большой скоростью. Как и говорилось выше, частью конструкции должен был стать парус, но затем от него решили отказаться в ходе испытаний прототипа, чтобы не усложнять задачу.
В самом начале испытаний робота испытали на реке, причем его запускали при помощи удочки. Все получилось, и достаточно быстро робот набрал скорость в 35 километров в час, оторвавшись от поврехности воды и отправившись в первый свой полет.
Удаленно можно спускать аппарат, управлять его килем, с тем, чтобы изменить направление движения. В ходе испытаний оказалось, что робот ведет себя так, как и задумано. «Мы летали очень близко к поверхности и любая ошибка могла привести к аварии. Мы все из-за этого сильно нервничали, но в то же время и наслаждались моментом», — говорит глава группы разработчиков.
На этапе proof-of-concept все прошло хорошо, так что аппарат решено было продолжать совершенствовать. Вскоре к общей конструкции должны добавить обещанный ранее парус, что позволит системе передвигаться еще быстрее. Таких «альбатросов» планируется запустить несколько, чтобы иметь возможность вести мониторинг обширных площадей морей и океанов.
Автор: Максим Агаджанов
Источник: https://geektimes.com/
- Наша продукция
- Презентации по направлениям
- Инжиниринг
- Консалтинг
- Металлообработка
- Моделирование
- Разработки
Понравилась статья? Тогда поддержите нас, поделитесь с друзьями и заглядывайте по рекламным ссылкам!
Сравнение топовых роботов-пылесосов Roborock S7 и Roborock S6 MaxV


- Цена
- Конструкция
- Комплектация
- Технические характеристики
- Функциональные возможности
- Тестирование
- Подводим итог

Привет всем читателям проекта Роботобзор! Недавно мы протестировали новинку 2021 года – флагман Roborock S7, который поступил в продажу в России в июне этого года. Робот оказался достаточно интересным и одним из лучших в своем ценовом сегменте, благодаря внедренным функциональным возможностям и характеристикам. Многие после просмотра обзора начали задавать вопрос, что лучше выбрать: новый Roborock S7 или Roborock S6 MaxV, который появился в продаже ровно за год до этого, в первой половине 2020 года. Так вот на основании результатов тестирования я сравнил эти два робота и выразил собственное мнение, какой лучше выбрать для тех или иных условий. В этот раз распределения баллов не будет, просто сравню их по основным параметрам и подведу итог. Итак, поехали!
Первым делом сравним стоимость роботов-пылесосов. Новинка Roborock S7 стоит 43 тыс. рублей на момент подготовки материалов, в то время как стоимость Roborock S6 MaxV колеблется в пределах 46-50 тыс. рублей.
Roborock S7:
Roborock S6 MaxV:
Видим, что оба робота относятся к премиальному сегменту и стоят не дешево, однако Roborock S7 все же имеет более выгодную цену. Но учтите, что это без станции для самоочистки, в комплекте идет обычная зарядная база.
Конструкция
Теперь визуально сравним эти роботы-пылесосы и посмотрим, чем они отличаются. И там, и там сверху установлено по 3 механических кнопки управления и лидар, оснащенный механической кнопкой, предотвращающей застревание под мебелью.

Вид сверху S6 MaxV
Только вот у обновленного Roborock S7 сверху добавили индикатор, который светится разными цветами, сигнализируя о статусе робота-пылесоса. Кроме этого при удерживании кнопки включения локального режима можно заблокировать панель управления от случайного включения детьми или животными.

На бампере двух роботов установлено по одному датчику стены с правой стороны. По центру у Roborock S6 MaxV установлена камера для распознавания предметов на полу, она является одной из ключевых изюминок в этом сравнении.

Вид спереди, камера
У Roborock S7 в этом месте стоит датчик обнаружения препятствий.

И там, и там пылесборник размещен под верхней крышкой, а бак для воды извлекается сзади, в принципе весомых отличий нет.
А вот если перевернуть роботы вверх дном видим, что у Roborock S7 установлена силиконовая щетка по центру.

А у Roborock S6 MaxV традиционная щетинисто-лепестковая:

Вид снизу, S6 MaxV
Боковые щетки одинаковые. Возле поворотного ролика у S7 установлен датчик распознавания ковров, которого нет у S6 MaxV. Кроме этого есть разница в платформах для влажной уборки. У S6 MaxV это обычная насадка с салфеткой, которая закрепляется снизу на роботе, а у S7 это специальный модуль под названием VibraRise. Салфетка оснащена подвижной секцией, которая вибрирует с частотой до 3000 раз в минуту и при этом способна автоматически подниматься на 5 мм при заезде на ковры. Это как раз ключевая изюминка Roborock S7.
Важно еще заметить, что Roborock S7 конструктивно поддерживает базу для самоочистки мусора, которая появится в продаже в ближайшее время. Roborock S6 MaxV не способен будет самоочищаться.
В остальном роботы одинаковые по размерам и качеству сборки. Так что конструктивно за S6 MaxV преимущество в активной камере, а у S7 в модуле для влажной уборки и опционально доступной базе для самоочистки. Центральную щетку пока что не берем в расчет, ее эффективность еще нужно проверить, что мы и сделаем дальше.
Комплектация
В коробке с Roborock S6 MaxV лежит пластиковая подложка под док станцию, инструкция, насадка с установленной салфеткой, база для зарядки с адаптером питания, а также запасной HEPA-фильтр. Комплектация достаточно скудная.

Комплектация S6 MaxV
Но и Roborock S7 укомплектован не лучше. К нему в комплекте идет база для зарядки с адаптером питания, насадка с салфеткой и инструкция. Запасной HEPA-фильтр не включен в комплект, подложки под док-станцию также нет, но она и не нужна. Дальше объясню почему.

Технические характеристики


Теперь сравним основные характеристики Roborock S6 MaxV и Roborock S7. Я их свел в таблицу для комфортного ознакомления:
| Roborock S6 MaxV | Roborock S7 | |
| Аккумулятор | Li-Ion АКБ 5200 мА*ч | Li-Ion АКБ 5200 мА*ч |
| Мощность всасывания | До 2500 Па | До 2500 Па |
| Время работы | До 180 минут | До 180 минут |
| Площадь уборки | До 250 м2 | До 250 м2 |
| Пылесборник | 460 мл | 470 мл |
| Бак для воды | 297 мл | 300 мл |
| Проходимость препятствий | До 2 см | До 2 см |
| Размеры | 350*97 мм | 350*97 мм |
| Уровень шума | До 67 дБ (65-67 дБ) | До 67 дБ (73 дБ) |
В принципе характеристики одинаковые, у Roborock S7 чуть-чуть больше пылесборник, но разница незначительная. Более важно выделить, что он громче работает, в скобках я указал пиковый уровень шума в максимальном режиме во время тестирования. Но на это также есть свои причины, о которых я также расскажу далее.
Функциональные возможности
По функционалу эти роботы во многом идентичны, однако у каждого из них есть своя основная фишка. Говоря о сходствах, оба робота управляются как через Mi Home, так и через фирменное мобильное приложение Roborock. При этом из основных функций оба робота поддерживают сохранение в памяти нескольких карт уборки, автоматическое зонирование помещения на комнаты, настройку режима уборки индивидуально для каждой комнаты, установку запретных зон и виртуальных стен на карте и голосовые оповещения на русском языке, если заказать русифицированную модель.
А вот отличия в функциях следующие. Благодаря камере Roborock S6 MaxV может распознавать предметы на полу и объезжать их в процессе уборки. При этом он способен фотографировать обнаруженные объекты и отображать на карте.
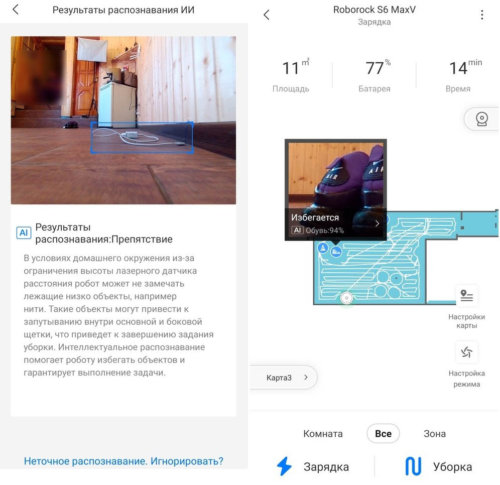
Чем это полезно? Если Вы являетесь владельцем домашнего питомца, который не приучен к лотку или нередко срыгивает на пол комки шерсти, робот способен идентифицировать сюрпризы и объезжать их, вместо того, чтобы размазывать по полу, как это делают практически все остальные роботы. Кроме этого к камере можно подключиться удаленно для дистанционного слежения за домом при необходимости. Это также полезная фишка Roborock S6 MaxV, которая многих подкупает.
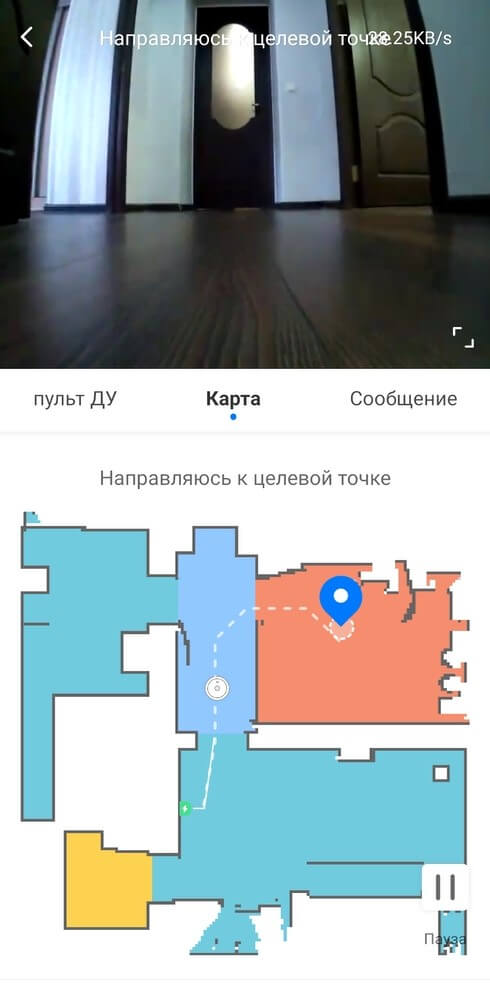
Удаленное слежение за домом
В свою очередь Roborock S7 может похвастаться продвинутой влажной уборкой за счет внедренной технологии VibraRise. Основная идея технологии заключается в том, что при обнаружении ковра робот способен поднимать салфетку на 5 мм над поверхностью. Таким образом при заезде на ковры исключается контакт влажной салфетки с ковровым покрытием, и робот способен за один цикл уборки пропылесосить и промыть пол, оставив ковры сухими и чистыми.

Подъем салфетки на ковре
Также салфетка автоматически поднимается при заезде на базу для зарядки, поэтому пластиковая подложку под станцию и не нужна. Длительный контакт мокрой салфетки с полом исключен, если вовремя ее не снять после уборки. На это пока что не способен ни один другой роботы на рынке, по крайней мере я не знаю аналогов с аналогично реализованной технологией.
Вместо автоматического подъема салфетки можно включить режим автоматического объезда ковров, чтобы не морочиться с установкой отдельных запретных зон на коврах для режима влажной уборки. Ну и как уже говорилось выше, салфетка вибрирует при уборке, а робот в скором времени научится самоочищаться на станции, это также можно отнести к отличительным чертам Roborock S7.
В итоге отличия в функционале следующие: за S6 MaxV активная камера для распознавания предметов и удаленное слежение за домом, а за S7 вибрирующая платформа, которая способна подниматься на коврах, а также при заезде на базу и сама база для самоочистки.
Тестирование
Ну и немаловажно сравнить, как роботы выполняют свою основную задачу. Мы сравним основные моменты, а именно:
- Общую точность навигации и схемы передвижения по дому.
- Мощность всасывания.
- Качество сухой уборки на ламинате.
- Качество сухой уборки на ковре.
- Качество влажной уборки.
- Способность проезда темных покрытий.
- И проходимость роботов-пылесосов.
Видео версия сравнения уже опубликована на нашем YouTube канале. Можете посмотреть видео:
Навигация у Roborock S7 и S6 MaxV одинаковая, если мы говорим об общем алгоритме передвижения и скорости уборки. Роботы зонируют помещение на комнаты и убирают комнату за комнатой сначала по периметру, а потом змейкой. В этом плане разницы нет.
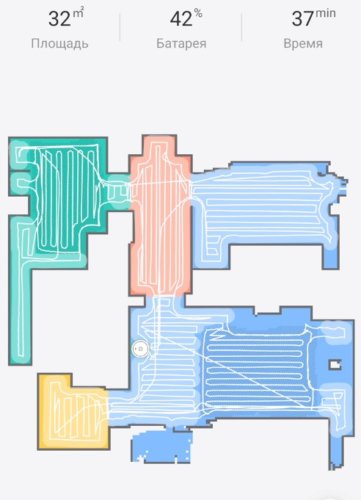
Навигация S7 в пределах дома
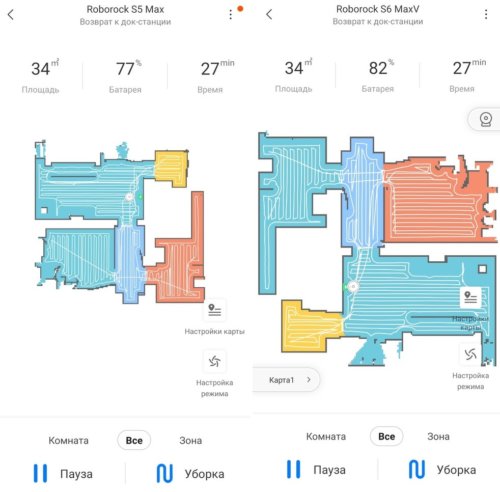
Навигация S5 Max и S6 MaxV
А вот мощность всасывания гораздо выше у Roborock S7 несмотря на то, что у сравниваемых роботов заявлено по 2500 Па. Видать тут сыграла роль новая конструкция щетки. Для сравнения, S7 смог высосать мусор из щелей глубиной до 10 мм, в то время как S6 MaxV способен частично выметать мусор только из 2 мм щели.

Мощность всасывания S6 MaxV

Мощность всасывания S7
Собственно, из-за этого Roborock S7 и громче работает на максимальной мощности. У робота сильнее всасывание и соответственно выше уровень шума.
Качество сухой уборки на ламинате у роботов на одном уровне, в принципе, как и качество сбора мусора на ковре. Минимальное преимущество за Roborock S6 MaxV, его щетка лучше собирает шерсть и волосы с пола благодаря щетинистым вставкам. Силиконовый валик также хорошо справляется с этой задачей, но все же иногда может оставлять клочья шерсти или волос, но в минимальном количестве. Зато силиконовый валик гораздо легче чистится от намотанных волос и шерсти.
Кому интересно, взаимозаменяемые ли щетки между Roborock S7 и S6 MaxV – нет, они разные по диаметру, поэтому, например, щетка от S6 MaxV, установленная в S7, набивается мусором и не способна закидывать его в пылесборник.

Состояние щетинисто-лепестковой щетки
Что касается качества влажной уборки, если говорить об оттирании загрязнений, тот тут я не заметил особой эффективности вибрирующей платформы. В примерно одинаковых условиях и тот, и другой робот оттерли подзасохшие следы грязи от обуви. А вот с оттиранием сложных загрязнений вибромодуль плохо справляется, чтобы отдать ему преимущество в сравнении. Но для деликатной влажной уборки оба робота одинаково хороши.
Что касается проходимости препятствий, оба робота способны переезжать 2 сантиметровые порожки, но Roborock S6 MaxV проезжает их чуть увереннее, так что опять-таки за этим роботом небольшое преимущество в плане проходимости.
Ну а темных покрытий боится, как Roborock S6 MaxV, так и Roborock S7. Так что в этом плане инженеры Роборок не устранили проблему.
Подводим итог
Что в итоге? Сравниваемые роботы-пылесосы оба хороши и имеют свои сильные стороны, которые могут стать весомыми аргументами для покупки. Если свести все основные моменты в таблице, получим:
| Roborock S6 MaxV | Roborock S7 |
| Распознает предметы на полу | Салфетка поднимается над коврами при уборке |
| Доступно удаленное слежение за домом через камеру робота | Опционально доступна база для самоочистки |
| Тише работает | Мощность всасывания значительно выше |
| Немного лучше убирает на коврах | Центральная щетка лучше чистится от намотанных волос и шерсти |
| Немного лучше проходимость препятствий | Возможно, в определенных условиях виброшвабра способна продемонстрировать свою эффективность. |
| Ниже цена (в комплектации с обычной базой) |
В результате я бы рекомендовал Roborock S6 MaxV в том случае, если в доме либо квартире нет ковров, но есть домашние животные, которые могут оставлять сюрпризы в зоне уборки роботом. Ну или в тех случаях, если для Вас будет полезным удаленное слежение за домом через робот, а также если, к примеру, дома есть дети, которые разбрасывают вещи на полу, после чего робот может уйти в ошибку, зажевав носки или шнур зарядного устройства.
Если же подобные ситуации исключены и на полу есть ковры, при этом вы выбираете робот-пылесос с функцией влажной уборки и базой для самоочистки, тогда рекомендую обратить внимание на Roborock S7. У него свои неоспоримые преимущества, а учитывая еще и более высокую мощность всасывания он явно способен глубже вычищать ковровые покрытия от осевшей пыли и мелкого мусора.
Ну а если для Вас покупка робота-пылесоса не является срочным решением и заинтересовали как сильные стороны Roborock S6 MaxV, так и Roborock S7, рекомендую дождаться выхода на рынок самой прокаченной модели в линейке Роборок, которая объединила в себе сильные стороны двух сравниваемых роботов. Это Roborock T7s, который был анонсирован сразу же после S7. Он оснащен базой для самоочситки, подъемным механизмом насадки для влажной уборки и системой обнаружения предметов на полу. Вот это уже очень интересное решение, которое выведет рынок роботов-пылесосов совершенно на другой уровень. Надеемся, что уже осенью новинка появится в свободной продаже и мы сможем ее протестировать.
На этой ноте и хотелось бы закончить сравнение Roborock S7 и Roborock S6 MaxV. Если остались вопросы, задавайте их в комментариях. Всем удачных покупок. Пока!
В США создали робота-червяка. Он может передвигаться в песке и мягкой почве
Возможно, подобный механизм когда-нибудь отправится в космос.

Мы видели, как роботы поднимаются в воздух, ныряют к морским глубинам и выполняют всевозможные маневры на суше. Теперь исследователи из Калифорнийского университета в Санта-Барбаре и Технологического института Джорджии достигли нового рубежа.
Взяв за основу растения и животных, которые эволюционировали, чтобы перемещаться по подземным пространствам, они разработали быстрого управляемого мягкого робота, который может прорываться сквозь песок. Эта технология не только открывает новые возможности для быстрого, точного и минимально инвазивного передвижения под землей, но также закладывает механическую основу для новых типов роботов.
По словам ученого, мир природы, к счастью, предоставляет множество примеров подземной навигации в виде растений и грибов, которые строят подземные сети. Кроме того, многие животные овладели способностью проходить туннели напрямую через гранулированную среду.
По словам Дэниела Гольдмана, профессора физики в Технологическом институте Джорджии, получение механического понимания того, как растения и животные освоили подземную навигацию, открывает множество возможностей для науки и технологий.
Робот, созданный исследователями, двигается в подземной среде, вытягивая вперед свой наконечник, оснащенного двумя форсунками, которые отбрасывают землю или песок, освобождая место для движения вперед.
Еще один навык, которым обладает робот, исследователи подсмотрели у южного песчаного осьминога (Octopus kaurna), который преодолевает высокий уровень сопротивления, создаваемый песком или рыхлой почвой, выбрасывая струю воды и втягиваясь в разрыхленную массу. В случае с новым механизмом робот выстреливает не водой, а воздухом.
По словам исследователей, созданный ими механизм имеет множество применений, таких как отбор почвы, подземный монтаж инженерных сетей и контроль эрозии.
Удлинение наконечника позволяет изменять направление, а также позволяет телу робота регулировать, насколько прочно он закреплен в среде. Этот контроль может оказаться полезным для исследования в условиях низкой гравитации. Команда разрабатывает механизм для NASA, чтобы создать устройство, способное отбирать пробы на Луне или даже на более далеких телах, таких как спутник Юпитера Энцелад.
«Мы считаем, что рытье нор может открыть новые возможности», — заключают исследователи. Источник
Пляшут роботы, а не человек
Инженеры Boston Dynamics продолжают радовать публику зажигательными танцами своих роботов
Американская компания Boston Dynamics отметила присоединение к концерну Hyundai новым видео с танцующими роботами. За пару лет компания смогла превратить танцы своих роботов в отдельный вид искусства.
Важное для Boston Dynamics событие отметили в танце сразу семь четвероногих роботов Spot, позавидовать хореографии которых могут и профессиональные танцоры. В прошлый раз компанию одному такому роботу в танце составили человекоподобные роботы Atlas и колесный робот Handle.
Впервые же инженеры Boston Dynamics похвастались танцевальными навыками Spot еще в 2018 году. Тогда четвероногий робот танцевал без партнеров.
Не танцами едиными
До того как «отдать» робота Atlas на танцы, его создатели преуспели в обучении робота азам паркура. В Boston Dynamics несколько раз демонстрировали успехи Atlas на этом поприще, а самым зрелищным его достижением стало сальто назад, совершенное в 2017 году.
masterok
 masterok
masterokМастерок.жж.рф
Хочу все знать
Давно уже присматриваюсь к этим устройствам. Как их только не называют и джетпаками и флайбордами. Да и конструкции уже есть разнообразные. Давайте побольше узнаем историю и способы применения нового средства передвижения на воде 🙂
Трудно сказать знает ли Фрэнки Запата (Franky Zapata) как ему в голову пришла эта гениальная идея. Чемпион Франции по аквабайку совсем недавно собрал фантастический и абсолютно безумный механизм для экстремального отдыха и развлечения. В интернете появился короткий ролик о его флайборде, после чего Фрэнк попросту собрался и уехал в путешествие на медовый месяц.
Вероятно это его последяя возможность уединиться с возлюбленной посокольку интернет молниеносно отреаировал на его изобретение и его телефон и электронная почта просто свихнулись.
Перед вами результат его инженерной мысли – Запата Флайборд. Это оригинальное и обманчиво простое устройство монтируется на любой мощный мотор гидроцикла. Флайборд представляет собой пару водометных ботинок и ручных стабилизаторов соединенных с гидроциклом длинным гибким шлангом, подающим струю воды к флайборду.
Конструкция позволяет взлетать над поверхностью воды на высоту до 9 метров кувыркаться в воздухе и плыть сквозь волны как человек-амфибия. А что самое интересное, стоимость флайборда составляет менее 5000 евро (6700 долларов США). Думаю, как только Фрэнки разгребет лавину заказов, он вернется домой, чтобы перевести дух и осовить пару новых трюков с Флайбордом.
Флайборд (Flyboard) соединен гибким шлангом с металлическим патрубком, которые крепится к водомету гидроцикла. Через гибкий патрубок мощный напор воды подается в пару водометных ботинок, жестко закрепленных на доске, по типу сноубордических креп. Стабилизация в воздухе осуществляется посредством двух водометов закреленных на руках пловца.
C единомышленником на пару, можно использовать базовую модель 4900 ($ 6570 США), в которой есть возможность управления водометами посредством дросселя с гидроцикла. Если вы решили отправиться в свободное плавание в одиночку, то за дополнительные 900 (1200 долларов США) устанавливается пусковые дроссели в ручные водометы, что на наш взгляд гораздо интереснее. В этой конфигурации можно вовсе забыть о гидроцикле, который только тянется позади вас, пока вы парите в воздухе и ныряете в волны.
Флайборд (Flyboard) дает прекрасную возможность выполнять многие гимнастические и акрабатические трюки, что позволяет предположить развитие нового вида акрабатического водного фристайла.
Учитывая сумасшедшее количество лошадиных сил доступное нынешним водным монстрам (гидроциклам с турбонагненателями и т.д.) флайборд, кажется, станет по-настоящему экстравагантным и потрясающим способом развлекаться на воде !
Недавно ажиотаж в среде любителей подобных аппаратов произвело устройство Jetlev на водном реактивном движке в виде ранца, принцип действия которого аналогичен Flyboard, за исключением того, что он не может перемещаться под водой, и он не такой маневренный.
Различия имеются и в цене аппаратов. Если стоимость Jetlev на глаз составляет около 165 тысяч долларов, то базовая комплектация Flyboard оценивается всего лишь 6,5 тысяч долларов.
Еще одним отличием Flyboard является, то, что его основной шланг, подающий воду, прикреплен к водному мотоциклу, а вода, выбрасываемая из сопел, сбрасывается в водоем. Мощность водяной струи регулируется с борта водного мотоцикла, и его мощность должна быть не меньше, чем 100 л.с, чтобы Flyboard мог работать. Это позволяет взлетать на высоту до 10 метров, и кроме этого, например, можно делать обратное сальто, нырять под воду и многое другое.
Вот еще такой аппарат
Аппарат, названный JetLev-Flyer – поднимается в воздух силой гигантских струй воды. Заборное устройство, насос и мощный мотор для его привода, а также приличных размеров бак с горючим — всё это находится на небольшом обтекаемом поплавке, соединённом с ранцем длинным и прочным шлангом (он же служит для ограничения высоты подъёма).
В самом же летающем аппарате есть только управляемые сопла. Таким образом, водяной ранец может подолгу нестись над водой и надолго зависать, в отличие от реактивных ранцев “классических”, запас горючего в которых исчерпывается в считанные секунды.
Теперь же Ли не только реализовал свою мечту, но и объявил, что с января нынешнего года начинает приём заказов на JetLev-Flyer. Особенно канадец рассчитывает на компании, занимающиеся досугом туристов
Судя по страничке “контакты” на сайте продукта, в промышленном выпуске новинки Рэймонд полагается на силы компании MS Watersports из немецкого города Итцехо (Itzehoe) – она специализируется как раз на водной мототехнике.
Как пишет Newfoundland and Labrador Independent, давление внутри труб ранца развивается не очень большое — порядка 7 атмосфер – так что ни риска взрыва, ни тем более ожога тут нет (и это ещё одно важное отличие от обычного реактивного пояса). А поскольку полёты проходят над реками, озёрами или морем, в случае аварии всё что грозит пилоту — падение в воду. Причём сам ранец обладает положительной плавучестью, так что поможет владельцу удержаться на поверхности при приводнении.
Аппарат способен достичь предельной высоты полёта в 15 метров, сообщает изобретатель (обычная — до 8 метров), и разогнаться до скорости 75 км/ч. Запас же хода обещан в 300 километров.
Сам Ли совершил более двух десятков полётов на этой машине при неизменном интересе публики. Увы, о сроках исполнения заказов Ли ничего не говорит. Неизвестна и стоимость устройства, но, судя по основным составляющим, она должна быть сопоставима с ценой водного мотоцикла.
Кстати, фото в начале поста из прошедших соревнований за Кубок Самарской области по аквабайку.
Главной изюминкой соревнований стало выступление пилота неведомой чудо-машины. Со стороны казалось, что на Волгу прямиком из комиксов прилетел Железный человек. В защитной броне из кевлара он парил над водной гладью, оставляя за собой мириады брызг. Супергерой выныривал из воды, поднимался на высоту пятиэтажного дома, заходил на виражи, срывался вниз и снова исчезал из вида под синими волнами. Когда супергерой вышел на берег, все в нем узнали Анатолия Шурана – самарского экстремала и большого любителя водных видов спорта. За собой он тащил агрегат, который в кругах любителей водного мотоспорта прозвали флайборд, или “летающая доска”. Совсем недавно этот механизм придумали французы. В его основе лежит принцип действия пожарного брандспойта, когда струя воды под сильным давлением может поднять в воздух не только рукав, но и держащего его пожарного.
Флайборд в Самару привез друг Анатолия, один из организаторов чемпионата по аквабайку, управляющий частным клубом Altera Pars Андрей Зуев. По его словам, он вместе с единомышленниками заказал чудо-аппарат во Франции за 450 тыс. руб. Впрочем, без гидроцикла он работать не будет, так что в стоимость этого экстремального аттракциона нужно закладывать еще и его цену. В целом на то, чтобы флайборд поднял пилота над водой, Зуев и компания потратили около 700 тыс. руб.
А вот были бы детские игрушки такого плана, мне кажется детям было бы очень интересно ! А то почему все удовольствия только взрослым 🙂
Гаджет считывает эмоции и помогает улучшить социальные навыки
Ученые Стэнфордского университета выяснили, что использование смарт-очков Google и специального ПО способно помочь детям с аутизмом развить навыки общения. Всего за 10 недель дети-аутисты, участвовавшие в эксперименте с очками, научились лучше поддерживать зрительный контакт с окружающими и распознавать их эмоции.
Ученые Стэнфордского университета (штат Калифорния, США) провели эксперимент, в ходе которого 14 детей-аутистов в возрасте от 3 до 17 лет в течение 10 недель использовали смарт-очки Google Glass в сочетании со специальным приложением для смартфона Superpower Glass System на базе Android. Выяснилось, что у детей с расстройством аутического спектра (РАС или ASD — autism spectrum disorder) наблюдаются нарушения в способности распознавать эмоций у окружающих и поддерживать с ними зрительный контакт, что сказывается на социальном взаимодействии ребят. Это следует из опубликованного в журнале NPJ Digital Medicine исследования, посвященного использованию гаджетов для развития коммуникативных навыков у детей с аутизмом.
Смарт-очки Google работают следующим образом. Встроенная видеокамера записывает изображение или звук общающихся с ребенком людей и передает его на смартфон или планшет с приложением, которое распознает эмоцию человека. Затем приложение передает информацию о той или иной эмоции на дисплей очков — в виде соответствующего смайлика или короткого сообщения. Все это автоматически записывается в шифрованном виде на закрытый сервер исследователей, которые затем могут анализировать результаты общения детей-аутистов с окружающими, их реакцию и прогресс.

Приложение для распознавания эмоций и передачи информации на смарт-очки также разработано в Стэнфорде — специалистами по технологиям и биомедицине в сотрудничестве с педиатрами того же университета. Руководитель проекта Деннис Уолл отмечает, что для создания программы команде пришлось обработать тысячи фотографий людей с разными душевными состояниями.
В ходе эксперимента дети разговаривали с членами своей семьи при участии исследователей. Сеанс общения длился около 20 минут. До и после каждой сессии родители заполняли опросник, где оценивали коммуникативные навыки ребенка. Ученые отмечают, что по шкале социальной отзывчивости, где результаты ниже 60 баллов означают условную «норму», а выше 75 — высокую степень аутизма, средний результат всех детей изменился с 80,07 балла до 72,93 балла. Кроме того, до начала исследований и после них дети прошли специальные тесты на распознавание эмоций — перед прохождением курса на 40 вопросов было дано в среднем 28,45 правильных ответа, после — 38.

Наталья Водянова о помощи детям c аутизмом, синдромом Дауна и ДЦП
По результатам исследований ученые и родители детей-аутистов отметили положительную динамику в развитии навыков общения. Мать 9-летнего Алекса Дондзи Калленбайн заявила, что уже спустя несколько недель после начала эксперимента ее ребенок стал намного лучше поддерживать с ней зрительный контакт. А сам ребенок неоднократно говорил ей: «Теперь я могу читать мысли».
В исследовании отмечается, что обычно детей-аутистов учат распознавать эмоции окружающих с помощью карточек с соответствующими рисунками и картинками. Однако в США специалистов хватает далеко не на всех, поэтому нередки случаи, когда для прохождения курса людям приходится ждать в очереди до полутора лет.
Вдохновленные первыми результатами ученые Стэнфорда начинают новые исследования. В них будет участвовать уже 74 ребенка, но в более узком возрастном диапазоне — от 6 до 12 лет. Группу разделят на тех, кто пройдет программу с использованием смарт-очков, и тех, кто пройдет традиционную программу развития навыков общения для детей-аутистов. По результатам сравнительных тестов исследователи надеются сделать более полные выводы об эффективности новой методики.
