
5 трендов робототехники: нейросети, распознавание речи и эмоций, навигация и системы безопасности
Робот — это не только «Валлиподобное» существо, но любое автоматическое устройство, которое осуществляет определенные действия по запрограммированному алгоритму. Роботы — это голосовые помощники, экскурсоводы в некоторых музеях, манипуляторы на производствах. Масштабы интеграции роботов в человеческую жизнь заставляют правительства и компании думать о повышении уровня безопасности и защиты человека от возможных ошибок роботов. Директор по развитию компании «Промобот» Олег Кивокурцев разобрался в главных вызовах робототехнической индустрии в 2019 году и собрал ключевые кейсы внедрения роботов в нашу жизнь.
Нейросетевые технологии
Каждый день выходят новости о новых применениях нейронных сетей. В США создается нейросеть, анимирующая 2D-изображения: она обрабатывает данные об объекте, отделяет его от фона и других объектов, а затем создает 3D-модель и механизм ее движения, заполняет фон, который ранее был закрыт объектом. В Израиле нейросеть определяет интеллект по форме черепа — система анализирует черты лица человека и на их основе определяет, какие особенности заложены в его ДНК. В России создают нейросеть, способную торговать криптовалютой — анализировать рынок и делать прогнозы.
Искусственная нейронная сеть (ИНС) — математическая модель (а также ее программное или аппаратное воплощение), построенная по принципу организации и функционирования биологических нейронных сетей — нервных клеток живого организма. Это понятие возникло при изучении процессов, протекающих в мозге, и при попытке смоделировать эти процессы.
Сфер применения этой технологии достаточно много. Например, нейросеть должна отличать собак и кошек. Для настройки алгоритма дается большой массив подписанных изображений кошек и собак. Нейросеть анализирует признаки объектов на этих картинках и строит распознавательную модель, которая минимизирует процент ошибок относительно эталонных результатов.
Кстати, когда Google просит вас подтвердить, что вы не робот, и отметить светофоры или автобусы, вы проходите не элементарный тест на когнитивные способности, а обучаете нейросеть различать объекты дорожной инфраструктуры. Система будет использоваться в беспилотниках.
Применение нейронных сетей ничем не ограничено, однако свое наиболее широкое применение в робототехнике нейросети нашли в голосовых помощниках и взаимодействии с людьми. Нейросети обеспечивают точность ответа на вопросы. Качество голосового помощника зависит именно от них. Среди голосовых помощников можно выделить Alexa от Amazon, Cortana от Microsoft и Siri от Apple. Среди русских голосовых помощников — «Алиса» от Яндекса.
Чем более качественно обучена нейросеть, тем лучше она подбирает ответы на запросы собеседника: понимает обратный порядок слов, контекст и непрямой запрос. Именно это направление станет одним из самых перспективных в разработках будущего. Поскольку интернет меняет социальные процессы, скорость передачи информации и вообще темп жизни колоссально выросли. Но человек становится все более одиноким. Станет актуален робот-компаньон, который будет удовлетворять потребность в общении, понимании, поддержке.
В Японии уже появляются цифровые компаньоны, функционал которых выходит за рамки простых консультантов. Они становятся помощниками, друзьями и даже женами. Запад тоже не отстает: 47 млн жителей США (а это почти 20% всего взрослого населения) пользуются умными колонками, Amazon Echo или Google Alexa. Причем, исходя из последних исследований, пользуются умными колонками, не только чтобы давать им команды. 25% берут их с собой спать, 20% шутят с ними, 15% используют как няню для детей — колонка рассказывает сказки и помогает отвлечь ребенка.
Умение поддерживать диалог станет одним из ключевых требований к роботам и одним из перспективных и востребованных направлений разработки.
Система распознавания речи
Одно дело просто подобрать ответ на запрос, но правильно услышать и расшифровать запрос собеседника намного труднее. На точность влияют все элементы системы распознавания речи: обучающая выборка и сами алгоритмы распознавания.
Влияет качество аудиопотока — отношение сигнал/шум, разборчивость речи и громкость. Современные системы пытаются дополнять «нерасслышанное» за счет лингвистических моделей — в каждом языке есть свои устойчивые выражения и устойчивые связки слов.
То есть когда говорят, что для распознавания используется контекст, то понимается наличие подстройки под распознавание за счет дополнительных данных, например, конкретные фразы использования, как в умных колонках, или использование определенного словаря для конкретной предметной области.
Точность или качество распознавания считается как отношение правильно распознанных слов к количеству всех произнесенных слов, также добавляется метрика ложных распознаваний как отношение ложно распознанных слов ко всем распознанным словам.
Компания LG представила в 2018 году своего домашнего помощника. На сцене Дэвид Вандервол, старший директор по маркетингу, пытался продемонстрировать Cloi — нового домашнего помощника от LG. По размеру чуть больше капельной кофеварки, Cloi должна находиться на столе, у нее нет рук и колес, ее голова вращается и кивает во время разговора. Это голосовой помощник, предназначенный помогать в организации вашей жизни.
На сцене Вандервол спрашивал у Cloi, когда закончится стирка — относительно простой запрос должен был точно продемонстрировать, какого именно помощника LG намерена продавать. В ответ Cloi ошеломляюще замолчала.
«Даже у роботов бывают тяжелые дни, — пытался отшутиться Вандервол. — Так, если нам известно, когда закончится стирка, то можно синхронизировать работу стиральной машины с сушилкой и вспомнить, что у нас в холодильнике курица, срок годности которой истекает через три дня. Похоже, мы должны ее приготовить. Cloi, включайся в беседу: что я могу приготовить из курицы».
Но даже на эту фразу Cloi ничего не ответила.
Неизвестно, что стало причиной провала: большое пространство с акустикой, качество интернет-соединения или же недоработки в ПО. Так или иначе, робот-проводник между человеком и техникой попросту не работал.
Флагманом индустрии считается Google — уже много лет он занимается разработками в этой области, достигнув наибольшей точности и стабильности распознавания. Летом он представил обновленный голосовой помощник — и утверждает, что точность распознавания (английского языка) сопоставима с человеческой. Чтобы обработать запрос и выдать релевантный ответ, системе Google требуется не более секунды.
 Промобот
Промобот
Однако для использования системы распознавания от Google необходимо приобретать лицензии, и это достаточно дорого. К тому же, устройство с распознаванием речи может использоваться в самых разных условиях. Параметры распознавания для домашнего помощника и робота в местах повышенного скопления людей разные. И эту специфику стараются учитывать разработчики «Промобота» — они разрабатывают систему микрофонных массивов и офлайн распознавания. Это позволит роботам меньше зависеть от качества интернет-соединения и оставаться хорошим собеседником как при нестабильном соединении, так и в шумных помещениях.
Технология распознавания лиц и эмоций
Для того, чтобы организовать качественное взаимодействие между человеком и роботом, необходимо понимать, кто находится перед машиной и какие эмоции испытывает человек. Такие данные позволят ему выбирать наиболее эффективную коммуникационную стратегию, делать релевантные предложения. Например, предложить скидку на любимый сорт мороженого, чтобы вы не грустили, или сообщить об акции в отделе косметики, если робот видит перед собой девушку.
Российская компания VisionLabs предлагает самые разные отрасли применения данной технологии. Платформа распознавания лиц LUNA позволит владельцу открывать машину без ключа и оплачивать покупки с помощью селфи. Распознавание лиц от VisionLabs внедрено в пропускную систему школы Сбербанка, используется для верификации студента при сдачи экзаменов в Московском институте психоанализа.
Если говорить о распознавании эмоций, то оно востребовано индустриями, где предполагается обслуживание. Например, «Альфа-банк» тестирует систему распознавания эмоций клиента. Алгоритм анализирует выражение лица посетителя, после обслуживания выставляет оценку. Так банк получает обратную связь, не прибегая к опросам и интервью.
«Промобот» и Neurodata Lab запустили пилотный проект робота-эмпата, способного распознавать до 20 эмоциональных состояний человека. В соответствии с распознанной эмоцией робот будет выстраивать общение — ободрять или успокаивать собеседника, начнет шутить и дерзить, если заметит положительную реакцию. Пока проект находится на стадии тестирования, однако робот уже был представлен на CES-2019.
Система навигации
В зависимости от задач, существуют outdoor- и indoor-технологии. Outdoor-навигация нужна для беспилотных автомобилей и летательных аппаратов, indoor-навигация — для охранных и сервисных роботов в зданиях.
Сегодня существуют два типа навигации: глобальные и локальные. Глобальные предполагают навигацию по спутниковым системам, они востребованы в системах outdoor, но непригодны для indoor. Не всегда есть связь и низкая точность отображения положения. Локальные включают в себя навигацию посредством ультразвуковых, оптических и инфракрасных систем. Существующие системы — дорогие, потому главным вызовом на 2019 год станет их удешевление.
Например, система датчиков для автомобиля Tesla стоила несколько сотен тысяч долларов. Но вследствие большого распространения автомобилей с автопилотом стоимость лидара уменьшилась из-за перехода из нишевого и дорогого товара в область широко распространенного. А также с появлением доступных и дешевых СВЧ-решений в робототехнике начинают применять радары миллиметрового диапазона, что раньше было доступно только как дорогая опция премиум-автомобилей.
Например, стартап Marvelmind создал высокоточную систему indoor-навигации стоимостью $349. Однако для его работы нужно от четырех стационарных маяков и один мобильный маяк, что затрудняет его применение на больших площадях и вне помещений.
 Навигационные устройства от Marvelmind
Навигационные устройства от Marvelmind
Если говорить о роботах в привычном понимании, то для того, чтобы робот «Промобот» передвигался самостоятельно, без столкновений, разработчики используют почти все типы измерений: ультразвук, инфракрасные датчики ближнего действия, лидары. Это обеспечивает максимальный уровень безопасности передвижения робота.
Информационная безопасность
Обеспечение безопасности — самое главное направление робототехники. После спада эйфории относительно роботов люди начали задумываться о безопасности себя и своих данных.
Тренды угроз информационной безопасности в сфере робототехники, в целом, не сильно отступают от общих в информационной среде. Развитие интернета вещей повлияло на активное распространение ботнет-сетей, что, к сожалению, также актуально и для подавляющего числа роботизированных устройств.
Производители часто пренебрегают серьезной защитой от киберугроз или же вообще ей пренебрегают, что приводит к использованию роботов с целью шпионажа, фишинга или кражи данных.
Недавно исследователи Positive Technologies заметили, что роботы-пылесосы подслушивают своих хозяев и передают эту информацию через интернет — и даже могут майнить криптовалюту. Используя уязвимости в системе безопасности, злоумышленник может перехватить конфиденциальные данные через сетевой трафик: это не только ваши фото, но даже данные банковского счета.
В начале года был опубликован отчет об уязвимостях робота Pepper. Экспертам удалось передать на устройство сторонние файлы без аутентификации и даже войти в аккаунт суперпользователя. Также они смогли осуществить перехват платежной информации, данных с видеокамер и микрофонов.
С точки зрения серьезности последствий, сегодня вопрос наиболее остро стоит в сфере промышленной робототехники. На конец 2018 года число атак на информационные сети российских АСУ ТП выше, чем на банки или частных лиц, а резонансные ситуации с вирусами-шифровальщиками служат подтверждением, что даже АЭС может стать жертвой кибератаки.
Одним из решений данной проблемы может стать использование ИИ для менеджмента безопасности, что уже сегодня постепенно реализуется ведущими производителями антивирусных систем.
Вместе с тем в ближайшие несколько лет количество роботов, с которыми нам приходится сталкиваться каждый день, существенно возрастет. От этого критерия зависит безопасность человека — ключевое направление, мировая робототехника обратит внимание на эту сферу как можно раньше.
Количество автоматизированных процессов растет, а значит и все больше роботов проникает в нашу повседневность. Требования к качеству работы роботов возрастают, поскольку они выходят на уровень инфраструктурной единицы, а не диковины и причуды. С развитием наиболее востребованных отраслей робототехники необходимо повысить качество работы голосовых ассистентов, включающих распознавание речи, качество обработки запросов и ответ на них. Для распространения беспилотников и сервисных роботов требуется удешевление систем навигации. Главным образом, для обеспечения безопасности человека и его данных при взаимодействии с роботами необходимо исключить все уязвимости в системе безопасности. Это и есть главные вызовы на 2019 год.
Software Journal:
Theory and Applications
 С.В. Ульянов
С.В. Ульянов- А.Г. Решетников
- К.В. Кошелев
 С.В. Ульянов
С.В. УльяновУсовершенствование вычислительной техники, устройств и сенсоров, позволяющих получать информацию об окружающей среде, – основной источник развития робототехнических систем и систем искусственного интеллекта. Данный процесс неразрывно связан с развитием ПО бортовых процессоров, которые используются при управлении автономным роботом. В настоящее время все чаще упоминаются системы, состоящие из комбинаций нескольких видеокамер, лазерных радаров, тепловизоров и других источников получения информации об окружающей среде. В данной статье приводится краткое описание разрабатываемой системы распознавания образов, которая базируется на технологии стереозрения. Применение стереозрения позволяет получить данные о глубине изображения, расстоянии до объектов, предоставляет возможность строить трехмерную картину окружающего мира. Также в работе представлено описание настройки используемого оборудования, рассмотрено совместное использование стереопары и лазерного дальномера при тестировании модуля навигации автономного робота.
The article was published in issue №2 by 2018 year
- Home »
- Issue №2 by 2018 year »
- Использование технологии стереозрения в системе навигации мобильного робота
Использование технологии стереозрения в системе навигации мобильного робота
В технологии стереозрения используются, как правило, две камеры, работающие синхронно, что позволяет восстанавливать форму и расположение наблюдаемых объектов в трехмерном пространстве. При этом создается трехмерная полигональная модель какого-либо объекта, формируемая на основе анализа изображений этого объекта, полученных разнесенными в пространстве камерами.
Обычно для машинного зрения и распознавания достаточно использовать одну камеру (существует множество примеров работ [1–3]), но стоит отметить, что стереозрение, в определенной степени повторяя особенности развития природного зрения, позволяет бортовой системе получать информацию не только о цвете и яркости объекта, но и о расстоянии до него, о его геометрической форме, о препятствиях на пути к объекту. Кроме того, совместное использование различных сенсоров и их комбинацийс технологией стереозрения позволяет более качественно и полно строить «сцену мира» для робота, тем самым улучшая его взаимодействие с окружающей средой. К таким сенсорам относятся сонары и лидары, радары; их применение, естественно, повышает себестоимость технического решения и сложность программного интеллекта бортовой системы.
Для операционной системы робота Robot Operating System (далее ROS) был разработан программный модуль распознавания объектов [4]. Фреймворк ROS представляет собой набор библиотек, утилит и соглашений. Система ROS предоставляет разработчику большое количество вспомогательного кода, позволяя ему сконцентрироваться на важнейших частях создаваемого ПО. Создание программного модуля распознавания объектов состоит из следующих этапов: настройка стереопары из двух камер, построение карты смещений (disparity map), использование карты смещений для получения облака точек с помощью 3D-визуализатора Rviz (ROS visualization), создание программного модуля распознавания объектов на языке программирования Python. Далее будет описано использование данного программного модуля распознавания на основе технологии стереозрения в системе навигации мобильного робота.
Настройка стереопары из двух камер
Настройка стереопары из двух камер является первым этапом при проектировании системы стереозрения в ROS. Для выполнения поставленной задачи была использована пара камер, изображенная на рисунке 1.

Для рабочем каталоге, который связан с ROS обеспечения возможности обмена данными между ROS и камерами необходимо создать в, пакет с файлом инициализации. В файле содержатся параметры для работы и изображением, а именно разрешение, имена видеоустройств (рис. 2).

В тексте файла видно, что каждая камера по сути становится узлом с определенным именем, а узлы, в свою очередь, взаимодействуют с ROS [4]. Выполнив команды, представленные на рисунке 3, получим изображение с используемых камер (рис. 4).


После успешного запуска камер можно переходить к калибровке. Калибровка камер позволяет исправлять дисторсию (аберрацию оптических систем), при которой коэффициент линейного увеличения изменяется по полю зрения объектива. При этом нарушается геометрическое подобие между объектом и его изображением. Калибровка стереопары будет производиться с помощью фреймворка ROS методом шахматной доски.
Калибровка камер обычно выполняется за счет многократной съемки калибровочного шаблона, на изображении можно легко выделить ключевые точки (рис. 5), для которых известны их относительные положения в пространстве. Затем находятся коэффициенты, связывающие координаты проекций, матрицы камер и положения точек шаблона в пространстве [4, 5].

Построение карты смещений (disparity map)
Для построения трехмерного изображения с помощью 3D-визуализатора Rviz (ROS visualization) используются карты глубины и карты смещений.
Для начала рассмотрим такое понятие, как карта глубины [6]. Карта глубины (depth map) – это способ представления объемных 3D-изображений в виде изображения, в котором каждому пикселю присваивается дополнительный параметр – глубина. Этот параметр показывает, на каком расстоянии от плоскости изображения расположен данный пиксель. Карта глубины может быть получена с помощью специальной камеры глубины (например, сенсор Kinect является своего рода такой камерой), а также может быть построена по изображениям, полученным со стереопары (подобные камеры начинают применяться в том числе и в мобильных устройствах).
При построении карты смещений для каждой точки на одном изображении выполняется поиск парной ей точки на другом изображении. По паре соответствующих точек можно выполнить триангуляцию и определить координаты их прообраза в трехмерном пространстве.
При известных трехмерных координатах прообраза глубина вычисляется как расстояние до плоскости камеры (рис. 6).

Для каждой точки на изображении с первой камеры соответствующую ей парную точку нужно искать в той же строчке на изображении со второй камеры. Для каждого пикселя левого изображения с координатами (x, y) выполняется поиск соответствующего пикселя на правом изображении. При этом предполагается, что пиксель на правом изображении должен иметь координаты (x – d, y), где d – величина, называемая смещением (disparity) (рис. 6) [7, 8].
Поиск соответствующего пикселя выполняется путем вычисления максимума функции отклика, в качестве которой может выступать, например, корреляция окрестностей пикселей.
В результате получается карта смещений (disparity map), пример которой приведен на рисунке 7.

Карта строится на основе изображений, которые получены ранее (рис. 4).
Получение облака точек с помощью 3D-визуализатора Rviz (ROS visualization)
3D-визуализатор Rviz – модуль фреймворка ROS, предназначенный для отображения данных с различных датчиков (включая камеры, сонары, дальномеры). С его помощью, например, можно построить трехмерную карту помещения, а робот под управлением ROS, используя полученные данные об объектах и препятствиях, сможет автономно перемещаться в этом помещении. Первоначально в области глобальных настроек Global Options напротив поля Fixed Frame указывается имя пакета, посредством которого ROS взаимодействует с камерами (usb_cam). Затем после нажатия на кнопку Add выбирается из списка PointCloud2 (рис. 8).

Сообщение sensor_msgs/PointCloud2 описывает облако точек в трехмерном пространстве [5]. На рисунке 9 показано трехмерное изображение, полученное с помощью стереопары из двух камер.

Программный модуль системы распознавания
При выполнении задачи по распознаванию объектов программный код создавался на языке программирования Python. В качестве объекта распознавания был выбран обычный теннисный мяч. Разработанный модуль производит распознавание объекта (рис. 10).

Следует отметить, что данный модуль дает возможность осуществлять слежение за объектом. Использование нейросетевого подхода в системе распознавания позволило значительно снизить негативное влияние внешних факторов на качество распознавания (погрешность распознавания при изменении ракурса объекта, изменение освещения, чувствительность ПО и т.д.) [9–11].
Модуль навигации мобильного робота
В последние пять лет применение роботов и робототехнических комплексов в различных проблемно-ориентированных областях промышленности дает сугубо положительный эффект, в ведущих странах мира этот эффект отражается в повышении эффективности труда на 15–25 % [12].
Также в настоящее время отчетливо видна тенденция перехода от промышленных роботов к роботам сервисного обслуживания с различной степенью социальной ответственности – медицинские роботы, роботы для ухода за детьми, роботы-ликвидаторы последствий техногенных катастроф, роботы-спасатели и т.д. При этом специалисты по проектированию и разработке различных роботов опираются на интеллектуальную платформу применения технологий интеллектуальных вычислений. Такой подход позволяет создавать гибридные промышленные роботы сервисного обслуживания специального назначения [12–19]. На рисунке 11 представлены примеры мобильных роботов, которые используются для ликвидации последствий землетрясений или техногенных катастроф. Данным роботам необходимо выполнять сложные технологические операции, стремиться минимально расходовать полезный ресурс. Именно интеллектуальные вычисления как базис системы управления робототехническим средством позволяют добиваться обозначенных выше целей.

В лаборатории интеллектуальных систем управления университета «Дубна» был сконструирован прототип автономного мобильного робота (рис. 12). С помощью именно данного прототипа происходило первичное тестирование описанного выше модуля распознавания и системы навигации.

Разработка системы навигации осуществлялась с помощью фреймворка ROS. На основе набора точек, полученных с помощью лазерного дальномера, система управления воссоздает двумерную карту помещения, на которой отмечаются присутствующие объекты и препятствия, что позволяет роботу при определенном качественном уровне системы управления избегать столкновений с различными объектами. По мере продвижения робота в пространстве происходит динамическое дополнение карты, что тоже дает определенные преимущества (позволяет использовать робота в недоступных или опасных для человека местах). Как и в случае со стереопарой, в системе ROS должен быть создан узел, обеспечивающий взаимодействие между лазерным дальномером и ROS на уровне файловой системы. Также было необходимо создать модель управляемого робота с его масштабируемыми параметрами (длина, ширина, высота), а затем добавить данную модель в систему навигации. Это необходимо для установления пространственных взаимосвязей между роботом и объектами окружающего мира. На рисунке 13 представлена полученная с помощью дальномера карта, на которой отмечены целевая точка и маршрут до нее.

Для расширения возможностей системы навигации (использование 3D-визуализации) и повышения качества управления в систему навигации мобильного робота был интегрирован модуль стереозрения, который описан выше. Использование технологии стереозрения позволит значительно улучшить уровень автономной навигации за счет совмещения двумерной и трехмерной карт и их последующего сохранения в системе. На рисунке 14 представлены исходное изображение и полученная на его основе карта глубины.

На основе описанного выше алгоритма полученные карты глубины генерируются в трехмерные изображения, на основе которых происходит 3D-реконструкция окружающего пространства (рис. 15).

В настоящее время ведется работа по оптимизации процесса взаимодействия модуля стереозрения и остальных бортовых устройств, а также проводится модернизация непосредственно системы распознавания образов, с помощью которой представляется возможным осуществление инвариантного распознавания объектов окружающей среды.
Заключение
В работе приводится описание процесса калибровки стереопары из двух камер, что необходимо для практического применения технологии стереозрения. На основе изображений, полученных со стереопары, построена карта глубины, которая используется для создания трехмерных изображений окружающих объектов. В качестве результата представлен программный модуль, с помощью которого производится распознавание объектов, осуществляется слежение за ними. Использование двух камер (стереопары)
в совокупности с технологиями интеллектуальных вычислений позволяет значительно повысить качество распознавания объектов [9–11]. Произведена интеграция модуля стереозрения в систему навигации мобильного робота, что позволит значительно расширить спектр решаемых роботом задач. Намечены дальнейшие пути развития.
Робот-навигация – Robot navigation
Локализация робота означает способность робота определять свое собственное положение и ориентацию в системе координат . Планирование пути фактически является расширением локализации, поскольку оно требует определения текущего положения робота и положения целевого местоположения, как в одной системе отсчета, так и в одной системе координат. Построение карты может иметь форму метрической карты или любой записи, описывающей местоположения в системе координат робота.
Для любого мобильного устройства важна возможность навигации в его среде. На первом месте стоит предотвращение опасных ситуаций, таких как столкновения и небезопасные условия ( температура , радиация, воздействие погодных условий и т. Д.), Но если у робота есть цель, связанная с определенными местами в среде робота, он должен найти эти места. В этой статье будет представлен обзор навыков навигации и попытаться определить основные блоки навигационной системы робота , типы навигационных систем и более подробно изучить связанные с ней компоненты здания.
Навигация робота означает способность робота определять свое собственное положение в системе отсчета, а затем планировать путь к некоторой цели. Для навигации в окружающей среде роботу или любому другому мобильному устройству требуется представление, то есть карта окружающей среды и способность интерпретировать это представление.
Навигацию можно определить как комбинацию трех основных компетенций:
- Самостоятельная локализация
- Планирование пути
- Построение и интерпретация карт
Некоторые системы навигации роботов используют одновременную локализацию и картографирование для создания трехмерных реконструкций своего окружения.
СОДЕРЖАНИЕ
- 1 Навигация на основе зрения
- 1.1 Внутренняя навигация
- 1.2 Автономные контроллеры полета
- 2 Инерциальная навигация
- 3 Акустическая навигация
- 4 Радионавигация
- 5 См. Также
- 6 Ссылки
- 7 Дальнейшее чтение
- 8 Внешние ссылки
Навигация на основе зрения
Навигация на основе технического зрения или оптическая навигация использует алгоритмы компьютерного зрения и оптические датчики, включая лазерный дальномер и фотометрические камеры с матрицами ПЗС , для извлечения визуальных характеристик, необходимых для локализации в окружающей среде. Однако существует ряд методов навигации и определения местоположения с использованием визуальной информации, основными компонентами каждого из которых являются:
- представления окружающей среды.
- сенсорные модели.
- алгоритмы локализации.
Чтобы дать обзор визуальной навигации и ее методов, мы классифицируем эти методы как внутреннюю навигацию и внешнюю навигацию .
Внутренняя навигация
Самый простой способ заставить робота отправиться в нужное место – просто направить его к этому месту. Это руководство может осуществляться разными способами: закапывать индуктивную петлю или магниты в пол, рисовать линии на полу или размещать маяки, маркеры, штрих-коды и т. Д. В окружающей среде. Такие автоматизированные транспортные средства (AGV) используются в промышленных сценариях для транспортных задач. Внутренняя навигация роботов возможна с помощью внутренних устройств позиционирования на базе IMU.
Существует гораздо больше разнообразных систем навигации для помещений. Основным справочником по внутренним и наружным навигационным системам является “Vision для навигации мобильных роботов: обзор” Гильерме Н. ДеСуза и Авинаша К. Кака.
Автономные контроллеры полета
Типичные автономные контроллеры полета с открытым исходным кодом могут летать в полностью автоматическом режиме и выполнять следующие операции;
- Взлетайте с земли и летите на заданную высоту
- Летите к одной или нескольким путевым точкам
- Орбита вокруг обозначенной точки
- Вернуться в исходное положение
- Снизьтесь с указанной скоростью и приземлите самолет.
Бортовой контроллер полета полагается на GPS для навигации и стабилизированного полета и часто использует дополнительные спутниковые системы функционального дополнения (SBAS) и датчик высоты (барометрического давления).
Инерциальная навигация
Некоторые навигационные системы для бортовых роботов основаны на инерциальных датчиках .
Акустическая навигация
Радионавигация
Роботы также могут определять свое местоположение с помощью радионавигации .
Анализ и выбор систем навигации робота для позиционирования в условиях замкнутого пространства
Рубрика: 2. Электроника, радиотехника и связь
Опубликовано в
Дата публикации: 27.06.2016
Статья просмотрена: 2268 раз
Библиографическое описание:
Белоногов, А. В. Анализ и выбор систем навигации робота для позиционирования в условиях замкнутого пространства / А. В. Белоногов. — Текст : непосредственный // Технические науки: проблемы и перспективы : материалы IV Междунар. науч. конф. (г. Санкт-Петербург, июль 2016 г.). — Санкт-Петербург : Свое издательство, 2016. — С. 40-42. — URL: https://moluch.ru/conf/tech/archive/166/10779/ (дата обращения: 14.08.2021).

Ключевые слова: навигация, позиционирование в условиях замкнутого пространства, классификация систем навигации
По данным аналитического исследования национальной ассоциации участников рынка робототехники в сегменте сервисных персональных роботов наблюдается стабильный рост. Так, в 2014 г. количество проданных роботов достигло 4,7 млн., что на 28 % больше результатов предыдущего года. Объем продаж достиг отметки $ 2,2 млрд [1].
Персональные сервисные роботы, например, роботы-пылесосы, наиболее часто применяются в бытовых помещениях, то есть в замкнутом пространстве. Одна из актуальных проблем использования роботов — это автономный, принятый без участия человека, выбор маршрута роботом. Основанием для выбора служит самостоятельный анализ ситуации. Навигация робота в пространстве — это комбинация выше озвученных задач.
Для решения задачи анализа, или позиционирования, используются определенный набор технических средств. Его использование решает данную задачу для определенных условий.
В состав используемых средств входит логический узел (программируемый логический контроллер, ЭВМ), а также набор датчиков. Датчики, или сенсоры, позволяют получить информацию об окружающей среде, например, расстояние до препятствия, на основании полученных данных управляющая система производит управление исполнительными устройствами (эффекторами) робота. Принципиальная схема представлена на рисунке 1.

Рис. 1. Базовые элементы роботизированных систем
Модули навигации, представленные на рынке
На рынке существуют готовые модули, решающие задачи позиционирования, но как правило, они направлены под строго определенный тип как условий, так и самого робота. Готовые решения имеют такие ограничения как скорость передвижения, максимально допустимые ускорения, габариты платформы и т. д. [2]
Наибольшую ценность в готовых решениях имеют используемые алгоритмы работы. Но в абсолютном большинстве случаев они закрыты для общего доступа. Кроме этого, программное обеспечение также имеет индивидуальный характер, применимый для определенных условий.
Таким образом, не существует готовых, универсальных решений для решения проблем навигации и как правило системы навигации разрабатываются индивидуально для используемого робота или условий среды.
Анализ систем навигации робота
При оценке методов навигации следует в первую очередь учитывать точность позиционирования. Так, принято считать, что допустимая ошибка при определении координат робота — это величина, значение которой не больше половины от минимальных габаритов робота. Кроме того, в условиях замкнутого пространства существует множество помех, таких как проблемы с отражением сигналов, неровности освещения и т. д. В этом случае среда вносит принципиальную неточность и неопределенность в каналы связи. В таких обстоятельствах стоит учитывать способность систем работать в условиях зашумлённой среды [3].
В зависимости от классификации выделяют несколько видов навигационных систем. Для движения по заданной траектории, обхода препятствий, что вероятно в бытовых условиях, предлагается выделить четыре вида навигационных систем: глобальная система, локальная, персональная и автономная системы.
Задача глобальной системы — определение абсолютных координат, т. е. широты и долготы. Это такие системы как GPS, RTK-GPS, Глонасс, которые используют спутники для позиционирования.
Точность таких систем зависит от множества факторов, но в условиях, близких к идеальным наиболее развитая из данных систем, GPS, способна обеспечить точность с ошибкой в пределах 60–90 см [4].
Применение систем глобального позиционирования осложняется их зависимостью от условий использования. Затруднительно или невозможно использовать данные системы внутри зданий, подземных сооружениях и т. д.
Таким образом, использование глобальных систем позиционирования имеет смысл при следовании по достаточно длинным маршрутам. Считается также, что чем крупнее робот, тем важнее для него применение глобального позиционирования [5].
Персональная система применяется при позиционировании отдельных частей робота и взаимодействии с близлежащими предметами. Такая направленность важна для устройств, имеющих манипуляторы [6].
Такие системы применяются для позиционирования в пределах какой-либо конкретной территории, например, для навигации робота-сборщика. Также персональные системы навигации применяются для следования по заданной линии, при движении по меткам.
Применение на практике данных систем позиционирования осложняется их узкой направленностью под заданную местность, они плохо адаптируются под изменённые условия и достаточно дороги. Их применение целесообразно для работы в пределах конкретной территории.
В рамках автономной системы навигации применяются гироскопы, цифровые компасы.
Существенным недостатком таких систем является их чувствительность к неравномерностям поверхности: наклонам, кочкам и т. д. Это вносит определенные ограничения на их использование.
Автономные системы навигации находят применение в условиях, когда передача или прием сигналов извне затруднен или невозможен [7]. Этот аспект важен для замкнутых пространств, так как, как было сказано выше, они имеют повышенную зашумленность среды.
Локальные системы используют для позиционирования некоторую точку, обычно стартовую. Данные системы могут применяться на относительно больших локациях, например, для тактических беспилотных самолетов, работающих в рамках известной территории. Система навигации A-GPS, использующая для позиционирования сотовые сети, также является локальной.
В условиях замкнутого пространства целесообразно применение локальной системы позиционирования. В настоящее время наиболее часто применяются системы, использующие дальномеры: лазерные, инфракрасные, ультразвуковые и т. д.
Существует довольно много методов обработки информации, поступающей от дальномеров, вот некоторые из них.
Гистограмма векторного поля
Данный метод нашел применение в скоростных системах. Основные его преимущества — быстродействие, нечувствительность к ошибкам и надежность [8].
Использование этого метода эффективно в динамической среде. Преимуществом данного метода является автоматический выбор траектории [9]
Диаграмма близких расстояний
Применяется в условиях малых расстояний между объектами, высокой активности окружающей среды и сложных траекторий [10].
Метод тангенциального избегания — наиболее эффективный и точный метод из выше перечисленных для навигации робота в среде движущихся и деформируемых препятствий [11].
Были проанализированы основные методы решения проблемы навигации роботизированных платформ. Из рассмотренных методов для условий замкнутого пространства подходит использование локальных систем позиционирования. Основным преимуществом таких методов является высокая точность, а также работа в условиях высокой зашумленности окружающей среды. Среди методов локальной навигации предлагается использовать метод тангенциального избегания, как наиболее универсального. Использование данного метода оправдано как в статической среде, так и в условиях движущихся или деформирующихся препятствий.
Применение только автономной системы навигации не позволяет прокладывать маршрут в условиях изменчивой окружающей среды.
Использование оставшихся методов позиционирования, персональных и локальных систем, нецелесообразно или невозможно в заданных условиях.
Австралия одобрила запуск сервиса по доставке посылок дронами

Австралийские власти разрешили компании Wing начать коммерческую доставку грузов воздушными дронами. Пока что доступ к сервису есть лишь примерно у сотни домов в окрестностях Крейса, Палмерстона и Франклина, а в ближайшие месяцы появится еще два региона.
Wing, «сестра» Google (обе компании принадлежат Alphabet), планирует работать с местным бизнесом для быстрой доставки продуктов и других товаров. Но у дронов есть ограничения: запрещены полеты над крупными дорогами и вблизи людей, воздушное сообщение открыто лишь с семи утра до восьми вечера по будням.
Дрон доставляет посылку прямо к дому и зависает над нужной точкой, после чего спускает груз на тросе.
Кроме Австралии, Wing работает в тестовом режиме в Норвегии. В дальнейшем планируется запуск сервиса в других странах.
Дубликаты не найдены
Ну, вот. У кого-то будет работа запускать вертолетики за деньги, а у меня даже радиоуправляемого нет. 🙁
Они что? Почту России обошли?!
да было уже, дрон кула то врезался
В России такое не прокатит. И дрон собьют и посылочку слямзят.


Новая и первая полностью автономная платформа SpaceX для посадки ступеней входит в порт




ASOG станет 3-м и, вероятно, последним кораблем во флоте SpaceX, способным поддерживать посадку ракетного ускорителя Falcon 9. Starship должен будет осуществлять приземление исключительно обратно на стартовый стол, располагаться который будет как на суше, так и на морских платформах.




Китайская компания запатентовала смартфон со встроенным дроном

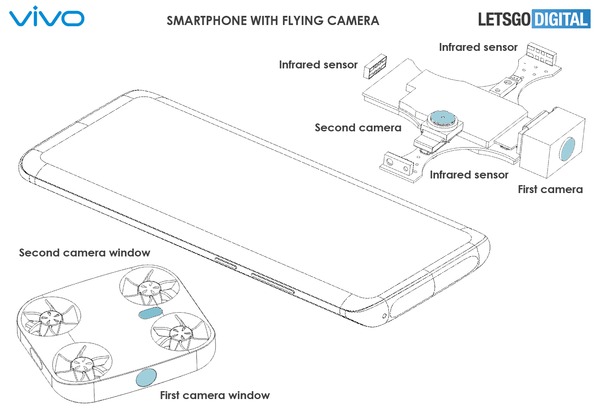
Китайская компания Vivo запатентовала смартфон, из которого должна вылетать камера в виде дрона. Внешне аппарат выглядит как обычный смартфон, но у него есть выдвижная конструкция в верхней части.
Конструкция смартфона описана в патентной заявке на сайте Всемирной организации интеллектуальной собственности (WIPO). В верхней части смартфона спрятан компактный дрон с двумя камерами (одна смотрит вверх, а другая – в сторону) и тремя инфракрасными датчиками. Благодаря этому можно делать фотографии с воздуха.
Если такой смартфон выпустят, можно будет снимать себя издалека или подлететь к удаленному объекту. Однако в патенте нет информации, как будет осуществляться управление дроном.
Можно предположить, что управление дроном осуществляется непосредственно со смартфона.



НАСА раскрыло зону полета первого дрона на Марсе
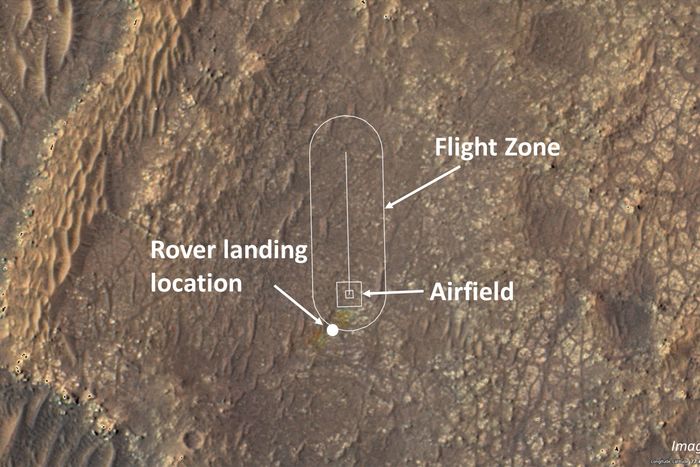
Инженеры объявили во вторник, что НАСА зафиксировало место на Марсе для первого демонстрационного полета своего дрона под названием Ingenuity. Четырехфунтовый винтокрылый аппарат готовится совершить первый полет на другой планете, демонстрируя новые возможности, которые в будущем могут открыть доступ к труднодоступным местам других небесных тел.
Ingenuity прибыл на Марс в феврале на марсоходе Perseverance. В течение нескольких часов после приземления Perseverance инженеры начали анализировать орбитальные снимки, чтобы найти лучшую зону полета, в которой Ingenuity может совершить свой первый полет — «зону, где безопасно взлетать, а также безопасно приземляться», — сказал главный пилот корабля Ховард Грип.
По его словам, посадочная площадка должна быть плоской и без каких-либо крупных камней, которые могут угрожать демонстрационным полетам Ingenuity. Но он также должен иметь «текстуру» — отличительные особенности на земле, которые навигационная камера вертолета на базе искусственного интеллекта может обнаружить, чтобы отследить его местонахождение во время полета. Вскоре после приземления «мы начали понимать, что у нас может быть действительно отличный аэродром прямо перед носом», — сказал Грип репортерам на брифинге для прессы во вторник.
Perseverance находится в движении к зоне полета, всего в 196 футах от места приземления. Когда он прибудет, дрон будет спущен на землю. Затем Perseverance проведет примерно 25 часов в пути на расстоянии около 330 футов к месту, которое НАСА назвало Van Zyl Overlook в честь Якоба Ван Зила, старшего научного сотрудника Лаборатории реактивного движения, который умер в прошлом году.
По словам Фарах Алибей, которая руководит интеграцией Ingenuity с Perseverance, передача Ingenuity в зону ее полета — «очень строгий и кропотливый процесс». Перед тем, как коснуться земли, нужно будет переключить Ingenuity из его текущего горизонтального положения на марсоходе в вертикальное, что займет «несколько дней», — сказала она. «Самым напряженным днем, по крайней мере для меня, будет тот последний день, когда мы наконец отделим дрон и установим Ingenuity на землю».

Lockheed Martin разработала систему, которая поможет Ingenuity приземлиться. Обеспечение легкости и безопасности этой системы было огромной проблемой даже для Lockheed, имеющей многолетний опыт проектирования космических систем. «Нам пришлось отбросить все это наследие и знания и буквально начать с нуля с новой схемой электрических соединений», — сказал в интервью The Verge Джереми Морри, главный инженер Lockheed по системе развертывания.
Инженеры НАСА ожидают, что Ingenuity проведет свои первые летные испытания не раньше 8 апреля, плюс-минус несколько дней в зависимости от погоды на Марсе. Зона полета вертолета имеет форму беговой дорожки с квадратной зоной взлета и посадки на одной стороне зоны. «Первый полет особенный — это, безусловно, самый важный полет, который мы планируем совершить», — сказал Грип, добавив, что успешный первый полет будет означать «полный успех миссии».
Для этого дебютного полета Ingenuity будет подниматься на высоту почти 10 футов (3 метра), зависать на месте около 30 секунд, разворачиваться в воздухе, а затем снижаться для приземления. Он будет полностью автономным и будет работать по командам, отправленным инженерами с Земли накануне. 0,5-мегапиксельная навигационная камера на нижней стороне Ingenuity будет делать 30 снимков земли в секунду, чтобы информировать о ее движении.
У Ingenuity есть еще одна, более мощная камера с 13 мегапикселями, обращенная к горизонту. Она сделает снимки в воздухе, а камеры на борту Perseverance будут стремиться запечатлеть дрон в полете. Все эти изображения в конечном итоге будут отправлены обратно на Землю.
Обзор мирового опыта коммерческой доставки грузов с помощью беспилотников

Идея использование беспилотников для коммерческой доставки грузов уже давно витает в воздухе. Не смотря на существующие административные барьеры, энтузиасты и корпорации вкладывают миллионы долларов в развитие данного направления, и это дает свои плоды.
Если пару лет назад единственным бонусом от разработки подобных проектов был PR в Интернете, где ролики с очередной «первой в мире доставкой беспилотником» набирали миллионы просмотров, то сейчас стали появляться серьезные проекты с реальными работами.
В данной статье проведем обзор наиболее интересных случаев использования беспилотников, а если более конкретно — беспилотных летательных аппаратов (БПЛА), для доставки грузов в коммерческих целях.
Amazon. Сервис доставки заказов Prime Air
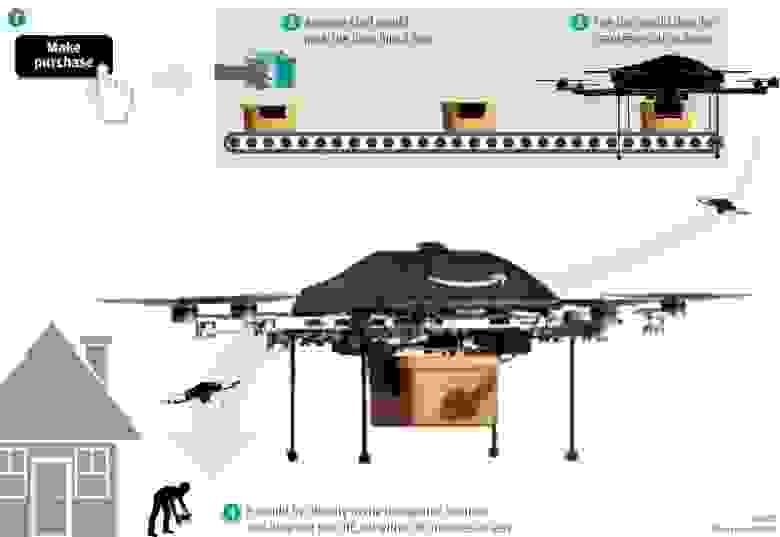
Компания Amazon, крупнейший Интернет-ритейлер, в декабре 2013 анонсировала свой самый быстрый способ доставки покупок – Amazon Prime Air. При помощи данного сервиса покупки, сделанные в Интернет-магазине Amazon, будут доставляться клиентам в течение 30 минут, что в 4 раза быстрее, чем действующий самый быстрый способ доставки Amazon Prime Now. Столь существенно ускорения планируется добиться за счет использования дронов.
Предполагается, что работать все будет довольно просто. Покупатель делает онлайн заказ и указывает Prime Air как способ доставки. В логистическом центре компании товар, выбранный клиентом, загружается на беспилотник. Затем БПЛА летит по указному адресу, приземляется, проводит выгрузку товара и улетает. После этого клиент забирает с земли упаковку с товаром.
В декабре 2016 компания провела первую тестовую доставку с использованием Prime Air.
Некто Ричард Б., живущий в графстве Кембриджшир, Англия, заказал Amazon Fire TV и собачий корм. Вес заказа составил 2.1 кг. Дрон, пролетев порядка нескольких миль, доставил покупку в течение 13 минут. Управление полетом дрона от взлета до посадки велось в автоматическом режиме. Люди выполняли лишь роль контролёра. Помещение груза в дрон перед взлетом также проводилось в автоматическом режиме.
В проекте, кроме ранее представленного дрона, использовались еще два аппарата. Первый был замечен в рекламном ролике с Джереми Кларксоном.

А второй отметился в ролике о первой доставке.

Но основной технической изюминкой проекта можно назвать идею использования аэростатов как логистических центров для хранения грузов и запуска беспилотников. 
Помимо разработки дронов компания сформулировала концепцию (тут и тут) разделения аэровоздушного пространства между пилотируемой авиацией и дронами.
Для обеспечения безопасности Amazon предлагает ограничить максимальную высоту полета дронов в 400 футов (
122 м), что на 100 футов (
30 м.) меньше чем минимальная разрешенная высота полетов гражданской авиации.

Также компания отмечает, что доставка с помощью БПЛА может по-настоящему раскрыться только при использовании автоматической системы управления полетами дронов, в которых человек выполнял бы только роль контролёра и мог одновременно обслуживать нескольких дронов.
На момент написания статьи сервис Prime Air находился на этапе тестирования.
Доставка дронами: кто будет первым?
О беспилотном сервисе
Доставка дронами (беспилотная авиапочта, англ. delivery drone) — способ доставки/транспортировки различных товаров (еда, медикаменты и т.д.) с помощью дронов коммерческого назначения. Большинство предлагаемых на сегодня решений строятся на конфигурации с шестью и более несущими винтами. Доставочный бокс помещается в располагаемый в нижней части коптера отсек (или крепится к самому дрону посредством крепёжного механизма). После доставки клиент получает посылку, либо сняв её с троса, спущенного с парящего в воздухе дрона (что исключает необходимость в приземлении), либо забирает из отсека после посадки БЛА.
Сегодня доставка дронами является одним из ключевых направлений, над которым работают как крупные производители БПЛА, так и компании специализирующиеся на доставке товаров по всему миру. В этой статье мы расскажем читателю о том, какие перспективы ожидают delivery drone, а также, кто будет первым в этой сфере бизнеса.

Лучшие разработчики
На сегодняшний день в числе первых успешных выступают четыре американские компании занимающиеся разработкой коммерческих дронов для доставки товаров:
- Amazon
- Wing Aviation
- Uber Technologies
- UPS & Matternet
Достижения компаний
Несмотря на то, что существует множество нормативных препятствий, которые еще предстоит преодолеть. Для США, 2019 год ознаменовал начало проведения ряда испытаний беспилотной доставки:
- Известно, что в этом месяце Wing Aviation совместно с FedEx и Walgreens начали осуществлять доставку в тестовом режиме с помощью своего дрона в Кристиансбурге, штата Вирджиния.
- Uber сообщили, что уже приступили к тестированию доставки дронами в Сан-Диего, штате Калифорния.
- Amazon не уточняют, где будут тестировать свои беспилотники, но еще в июне компания заявила, что начнёт доставлять посылки потребителям с помощью БЛА «в течении ближайших нескольких месяцев».
- UPS & Matternet на днях отчитались, что прошли полную сертификацию в FAA, что позволяет им работать в качестве беспилотной авиакомпании, использующей технологию беспилотных летательных аппаратов Matternet для расширения процесса доставки срочных предметов по требованию по всей стране.

Какие перспективы?
По мнению отраслевых экспертов, для запуска крупномасштабного сервиса доставки дронами требуется довольно много времени. Тем не менее, ожидается, что продажи беспилотников для коммерческих целей, сильно вырастут. По оценкам FAA, это число вырастет с 600 000 (по состоянию на 2016 год), до приблизительно 2.7 миллиона в 2020 году.

Дроны
Amazon
Компания Amazon тестирует свои беспилотники в Кембридже, Англия, с 2016 года. Известно, что прежде, чем остановиться на последней гексагональной конфигурации, разработчикам пришлось рассмотреть около 50 000 концепций. Дрон «Amazon» представляет собой довольно интересный дизайн с шестиугольной формой и установленной защитой вокруг шести несущих винтов. Чтобы доставить посылку дрон Amazon приземляется. Взлёт и посадка осуществляется вертикально. Для осуществления скоростного полёта беспилотник переходит из горизонтального режима в полугоризонтальный. Дрон может совершать 20-километровое путешествие туда и обратно, и обещает доставку в течение 30 минут. Для обнаружения проводов, птиц и зданий беспилотник использует алгоритмы машинного обучения в сочетании с системой инфракрасных сенсоров. Компания программирует свои дроны для различных сценариев, чтобы они знали, что делать, когда, например, прибудут к месту доставки.

Wing Aviation
Дизайн дрона Wings Aviation — еще более необычный. Для реализации вертикального взлёта и посадки их беспилотник оснащён 12 маленькими пропеллерами. Для горизонтального полёта на более высоких скоростях предусмотрены крылья с двумя большими винтами. Беспилотник Wing опускает посылку с помощью троса, что исключает из процесса доставки его посадку. Способен осуществить доставку в течение 10 минут на расстояние до 19 километров.

Wing aviation испытывает свои дроны с 2014 года в Австралии. По данным Wall Street Journal компания провела уже более 80 000 испытаний. Как упоминалось ранее, Wing Aviation сотрудничает с компаниями FedEx и Walgreens с целью осуществления доставки небольших пакетов в Кристиансбург, штат Вирджиния. Разработчик не сообщает посредством каких технологий осуществляется определение и облёт препятствий.
Uber Technologies
Дрон Uber получил традиционную конфигурацию. Это гексакоптер, который на деле является модифицированным беспилотником AR200 от AirRobot. В мае этого года Uber совместно с McDonald’s провели тестирование доставки дронами неподалёку от Калифорнийского университета в Сан-Диего. Компания сообщает, что жители проживающие в непосредственной близости от университета, скоро смогут заказывать еду, доставляемую дроном, из ограниченного числа местных ресторанов через приложение Uber Eats. Uber обещает доставку в среднем за 7 минут на расстояние до 4.8 километров. Разработчик не сообщает посредством каких технологий осуществляется определение и облёт препятствий.

UPS & Matternet
Автономная платформа Matternet M2 Drone включает в себя сам дрон Matternet M2, станцию управления Matternet и облачную платформу Matternet, посредством которой осуществляется взаимодействие с сетями Matternet. Дрон получил классическую конфигурацию квадрокоптера. Потенциал платформы позволяет в автоматическом режиме принимать запросы клиентов, генерировать маршруты, контролировать и управлять всеми действующими активами Matternet. Разработчик представляет свою платформу в качестве услуги для организаций здравоохранения, электронной коммерции и логистики. Дрон M2 авторизован Швейцарским авиационным управлением для полноценных логистических операций над городами. Предназначен для перевозки грузов весом до 2 кг или 4 литров на расстояния до 20 км, в режиме работы 24/7/365.

Matternet во главе с Boeing HorizonX Ventures привлекли 16 миллионов долларов в рамках финансирования серии A. Компания будет использовать эти средства для расширения деятельности США и глобальных операций в городских условиях.
