
Рыжий и бесстыжий: кот на протезах устраивает побеги от своих врачей-спасителей

Рыжий провел четыре года на улице и два года – в клинике.
Фото: Алена МАРТЫНОВА
Новосибирский ветеринар Сергей Горшков сделал несчастного уличного кота настоящей звездой мировых СМИ. Отморозивший себе все лапки котейка должен был быть усыплен, но ветеринар подарил ему новые протезы-«копытца» вместо прежних лап. Встав на ноги, Рыжий завоевал место талисмана клиники – оставили его жить прямо там, не стали подыскивать семью. Между тем это очень шустрый талисман, который уже несколько раз пытался совершить побег на новых лапках. Доктор же получил мировую славу, и теперь к нему везут животных-ампутантов со всей России. Корреспонденты КП-Новосибирск побывали в гостях у Рыжего и его спасителей.

Рыжий – любимец ветеринаров.
Фото: Алена МАРТЫНОВА
«БАШМАЧКИ» ДЛЯ КОТА
Ветеринарная клиника «Бэст» прославила город не хуже Новосибирского зоопарка. История рыжего кота начинается в 2017 году. Тогда прохожие нашли обмороженного и почти мертвого котика в томском сугробе. Уши буквально отваливались, а лапы и хвост превратились в ледышки. Ветврачи местной клиники сохранили коту жизнь, но уши, часть хвоста и частично лапки Рыжему пришлось ампутировать.
Для домашнего хищника лишиться всех своих лап равносильно смерти. Рыжий потерял интерес к жизни. Круглые сутки лежал, отвернувшись от всех. Его даже хотели усыпить. Услышав страшную историю от зоозащитников, ветеринар Сергей Горшков решил во что бы то ни стало вернуть животному подвижность.
Лапки превратились в «копыта». По ночам кот совершает обход клиники.
Фото: Алена МАРТЫНОВА
– Сейчас мы знаем множество историй о спортсменах, которые достигают невероятных результатов, несмотря на потерю руки или ноги. Мы решили перенести технологию бионических протезов для людей на животных. Это совершенно не больно, а сам материал похож на тот, из которого растут рога у оленей, – рассказал КП-Новосибирск ветеринар Сергей Горшков.
Полгода Рыжий провел под присмотром врачей, прежде чем для него разработали и отпечатали протезы.
Протезы ставили полгода, но теперь кот доволен.
Фото: Алена МАРТЫНОВА
– Их сделали методом 3D-печати путем селективного лазерного спекания пористого порошка титана. На первом этапе я разработал модель в специальной программе-планировщике. После коррекции 3D-модели выполняется ее печать на специальном аддитивном принтере. Затем на полученную модель мы наносим биопокрытие из гидроксиапатита для лучшего сращения стана с костью. Данная технология была разработана и используется совместно с коллегами из томского политеха. Внешние экзопротезы были изготовлены из распечатанных форм и заливки силиконом. Потом из «умного» пластика напечатали силиконовые лапки-башмачки, – описал процесс Сергей Горшков.
Подобный эксперимент уже проводили в Англии. В 2007 году в клинике доктора Фитцпатрика коту Оскару поставили два протеза задних лап. Тогда это стоило огромных денег – около полумиллиона рублей. Но благодаря технологиям аддиктивной печати протезы Рыжего обошлись в 100 раз дешевле – 5 тысяч рублей за лапу! И он стал первым в мире котом, у которого было сразу четыре протеза.
Установка одной лапы обошлась бы в 20 тысяч рублей.
Итак, Рыжему сначала заменили передние лапы, спустя несколько месяцев удалось заживить все раны. Пришлось надеть аппараты Илизарова, и только после этого кость срослась с имплантом. Потом поставили протезы на задние лапки.
– Мы сперва думали пристроить его в семью, но обнаружили хроническую болезнь почек, поэтому оставили жить при клинике, – говорит ветеринар.
Кот пользуется славой и клянчит корм.
Фото: Алена МАРТЫНОВА
Попав в клинику, Рыжий сначала был ласков и мил, но потом встал на ноги – и показал себя типичным надменным котом. Наглецом и бунтарем! Уличный кот сейчас считает, что клиника – это его территория. Не стесняется попросить еды у каждого встречного-поперечного, спит на диванах для посетителей – в общем, обычная наглая кошачья морда, которой все всё прощают. Даже побеги!
– Летом кот отправляется гулять по крыльцу, греться на солнце. Но даже для кота-инвалида нет ничего дороже свободы, он сбегал от нас уже десятки раз. Любит убежать за гаражи. Даже зимой хочет уйти на улицу побегать, пытается сбежать. Вот характер! – улыбается Сергей Горшков.
Кот ночует везде, где хочет.
Фото: Алена МАРТЫНОВА
Кстати, кот оказался таким подвижным, что умудрился сломать одну из подушечек-лап. Ее пришлось заменить на более устойчивое «копытце». Кот буквально скачет по клинике, а врачи шутят:
– Хорошо, что у нас снизу нет соседей – были бы жалобы на «топот котов».
– Кот ночует везде, где хочет. Ночью он совершает обход – это очень важный ритуал. Еще один нюанс: кот не может умываться. Но две женщины-администратора ухаживают за пушистой знаменитостью, вычесывают и гладят его шерсть. Других животных в клинике Рыжий терпит, но чувствует себя на правах главного, – перечисляет привычки питомца 31-летний Сергей Горшков. Всего за четыре года молодой доктор прооперировал 36 подобных кошек – и это только начало его медицинского пути…
Протез для Гавроша. Чудом спасшийся кот борется за жизнь







Трехлетний Гаврош – очень ласковый и добрый кот. Он любит играть с другими животными и сидеть на руках у людей. Последние месяцы Гаврош ходит на задних лапах. Этот прием он освоил не для развлечения: передние лапы ему отрезало капканом, когда хозяйка бросила кота зимой на улице. Предполагается, что несчастное животное провело в капкане несколько месяцев. За это время Гаврош сильно истощал, а правое ухо потерял в драке. Сейчас кот живет в приюте, а петербуржцы собирают деньги ему на протезы.
«Я удивляюсь, как он вообще выжил, – говорит сотрудница приюта Марина. – Надеюсь, что теперь у Гавроша все будет хорошо: мы поставим его на ноги и найдем новых, хороших хозяев!»

В капкане
Эта история произошла в селе Залесянка в Саратовской области. В октябре прошлого года владелица дачного участка переехала на зиму в город, а кота оставила до весны на улице. По мнению женщины, он должен был ловить грызунов и охранять от них дом. К тому же, как позже призналась хозяйка животного, она не хотела привозить кота в свою новую квартиру – было жалко ремонт и мебель. Когда в мае женщина вернулась на дачу, кот буквально выполз к ней на животе – передние лапы у него были отрублены.
Хутор, где находится дачный участок, окружен лесом. Судя по всему, там кот пытался найти себе пропитание и угодил в капкан, поставленный на лису. По оценкам специалистов, в капкане бедное животное провело не меньше двух месяцев. В результате полученных травм он лишился части передних лап. Кот выжил чудом: до сих пор зоозащитники не могут понять, чем он питался все это время, как умудрялся добывать себе еду, и как избежал участи быть съеденным лисами или волками.
Хозяйка кота не придала большого значения трагедии, случившейся с ее питомцем. Тревогу забила дочь женщины: она позвонила петербургским зоозащитникам и попросила о помощи. Местные врачи сообщили, что могут только усыпить кота-инвалида, поэтому волонтеры поняли: нужно забрать животное в Петербург. В июле за ним в Саратовскую область приехал владелец домашнего приюта, сотрудник МЧС Александр Коротаев. У нерадивой хозяйки Александр забрал сразу четырех животных – кота, лишившего лап, и истощенную кошку, которая тоже провела зиму на улице и родила двух котят. Кошку женщина отдала с боем: ловить мышей у нее больше некому.

Гаврошу сделают протезы
Когда животные только перебрались на новое место жительства, они были в ужасном состоянии. «Кот был страшно истощен, настоящий скелет, – вспоминает основательница приюта Марина. – Шерсть на животе сильно поредела, а на лапках развился остеомиелит – гнойное заражение костей. Он до сих пор боится выходить на улицу, когда мы едем к врачу – переживает, что его вернут прежней хозяйке в Саратовскую область».
До переезда в Петербург кот был безымянным. Марина назвала его Гаврошем – в честь бездомного мальчика-оборванца из романа Виктора Гюго.
Гаврош мужественно прошел лечение антибиотиками, вылечился от остеомиелита и отъелся. Сейчас он весит уже 7 кг.

«Первое время он ел с жадностью, – вспоминает Марина. – Видимо, боялся, что у него отберут пищу. Во время еды он даже пытался «помогать» себе лапками».
Сейчас раны на лапах Гавроша затянулись, и теперь волонтеры будут ставить кота на ноги. В Петербурге нашелся пластический хирург, который предложил пересадить подушечки с задних лап Гавроша на передние, чтобы кот смог безболезненно опираться на все четыре лапы. Такой вариант показался зоозащитникам опасным: существовал риск, что животное после операции не сможет наступать ни на одну лапу. Тогда волонтеры нашли клинику в Москве, где Гаврошу предложили сделать съемные протезы. На этой неделе коту сделают рентген, а потом – компьютерную томограмму, по результатам которой можно будет изготовить новые «лапы» для Гавроша. Сейчас волонтеры собирают деньги на протезы для кота. В настоящее время нашли уже 11 тысяч рублей.

«Кот-динозаврик»
Сейчас кот живет в петербургском приюте. Несмотря на непростую судьбу, Гаврош оказался очень жизнерадостным и любвеобильным котом. Он моментально нашел общий язык с другими животными: собаки зализывают ему раненое ухо, а кошки греют своим теплом. В отличие от многих кошачьих, Гаврош обожает купаться и плескать в теплой воде. Он очень любит людей: ему нравится сидеть на руках и кататься на плече у волонтеров.

«Он даже бегает на задних лапах, особенно за мясом, – рассказывает Марина. – При этом он поджимает передние лапы и становится похож на маленького динозаврика. Дома он много прыгает и скачет. Гаврош очень дружелюбный, у меня никогда не было таких котов!».
Главная задача волонтеров – поставить кота на лапы и найти Гаврошу новых хозяев, которые уже никогда его не обидят. Благо, желающие забрать Гавроша себе уже есть. Пока кот не переберется к новым хозяевам, он будет жить в приюте. Порой он может проявить свой характер.
«Он даже бьет собак по морде лапами, – говорит Марина. – Видно, что ему приходилось защищаться, пока он жил в лесу. Мне смешно: это сейчас собакам не больно, а что будет, если, например, Гаврошу поставят титановые протезы?».
Ведутся разработки платформы, способной управлять объектами при помощи рук
Управление руками в виртуальной реальности
В прошлом посте мы рассмотрели как встать из-за компьютера и начать ходить/бегать/прыгать с помощью платформы. @nikitastaf1996 погоревал об отсутствии перчаток. Ну что ж, они есть, и продолжают разрабатываться. Для многих игр перчатки и вовсе не нужны, ведь есть джостики в виде пистолетов, ружей и прочего, есть вполне удобные контроллеры, заменяющие стрельбу из лука, автоматов, кидание гранат, да и в принципе показывающие положение рук (игра в бокс vr).
Но вернемся именно к нашим виртуальным рукам.

Разработки велись еще давно, и одной из первых доступных стало чудо-чудовище Power Glove – контроллер-перчатка для игровой консоли NES. Это первый контроллер, повторяющий движения руками на телевизионном экране в реальном времени. Power Glove не был популярен и критиковался за низкую точность и сложность в использовании. Шел 1989 год, а стоимость была аж 80$. Для перчатки специально выпустили пару игр: Super Glove Ball — 3D головоломка и Bad Street Brawler. Подробней не будем, ибо это уже прошлое и внешний вид приводит меня в ужас.

Перчатка Essential Reality P5 Glove разрабатывалась и создавалась, в первую очередь, для домашнего использования и для компьютерных игр. Поэтому производитель постарался учесть требования именно этой индустрии.

Изящней конечно. Но в мои представления о прекрасном эта игрушка никак не вписывается. Не так уж и много приложений, в которых поддерживается P5 Glove. На сегодняшний день такой поддержкой обладают всего несколько игр – Hitman 2, Tiger Hunt, Beach Head 2000, Serious Sam 2 и Black&White. Три из них поставляются в комплекте с перчаткой, на другие придётся ставить патчи. В любых других играх P5 Glove можно использовать в режиме эмуляции мышки. Работать будет, но вместо шести степеней свободы останутся две – влево/вправо и вперёд/назад.

У перчатки есть базовая станция. Стоит комплект 3,5 тысяч рубликов. Не будем рассматривать далее, ибо полного погружения в виртуальную реальность я с ней представить себе не могу. Да и громоздко. Оставим Essential Reality P5 Glove пользователям PC, Mac OS 9 (кроме игр). В будущем планируется поддержка игровых консолей PS2 и Xbox.

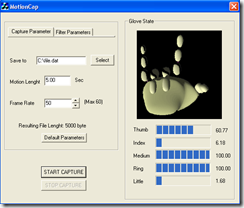
В базовом варианте DG5-VHand не может определять ни угол наклона, ни поворота – для этого потребуется докупать дополнительный датчик. Перчатка определяет только сжатие и пальцев, и этого достаточно для 3D-редакторов, но вот для полноценной виртуальной реальности будет не хватать возможности определения местоположения руки в пространстве. Конструктивно DG5-VHand состоит из двух частей – непосредственно матерчатой перчатки со встроенными сенсорами и блока управления.
Перчатка DG5-VHand поставляется в небольшом пластиковом чемоданчике. Не спешите выбрасывать упаковку – этот чемоданчик очень удобен для длительного хранения манипулятора и транспортировки его на любые расстояния.
Внутри этого маленького чемоданчика находятся:
Сама перчатка с сенсорами
Удлинённый шлейф, соединяющий контрольный блок и перчатку
Соединительный кабель (RS-232 + питание)
Блок питания 220В
Компакт-диск с программным обеспечением

Инсталляция драйверов никаких сложностей не вызывает – на жёсткий диск записываются несколько программ для проверки работы перчатки и SDK для программистов. Главное помнить, что перед запуском любой программы, в которой планируется использовать перчатку, DG5-VHand должна быть подключена к компьютеру и включена в сеть.
Такую перчатку уже в принципе можно представить при игре, и есть даже отзывы фанатов окулуса, играющих с ней. Но по мне – это еще не совсем то, что нужно. Да и цена в 600$ (единственная мною найденная, и то не для продажи) меня не радует, т.к. это почти 46000.
Браслет MYO за 17 тысяч российских рублей.

Браслет MYO – это очень удобный и футуристичный контроллер, который позволяет при помощи жестов и движения руки управлять внешним миром, как реальным так и виртуальным.
Принцип работы браслета MYO заключается в считывание электрических импульсов при сокращениею мыщц и сухожилий, когда вы двигаете рукой или пальцами.

MYO интерпретирует ваши движения в заранее запрограмированные действия. Тем самым вы можете управлять Вашим аудиоплеером и преключать треки, играть в виртуальные миры, показывать презентацию.
Тамбовские учёные создали универсальную платформу с искусственным интеллектом
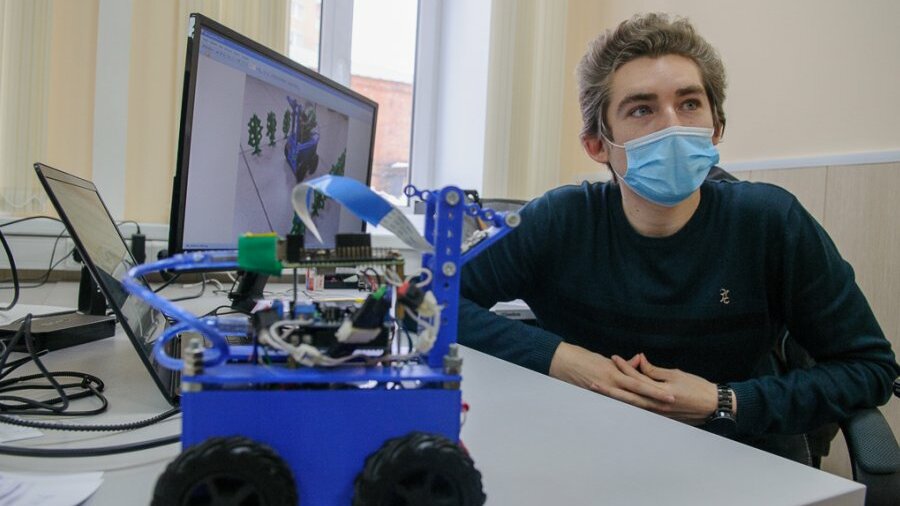
Тамбовские учёные разработали умную машину, которая может почти всё. Пока прототип универсальной платформы, управляемой с помощью искусственного интеллекта, помещается на ладони. Но недавно на базе ТГТУ в центре коллективного пользования «Цифровое машиностроение» приступили к комплектованию первой полномасштабной версии этой платформы.
Применять изобретение можно в аграрной сфере, например, при сборе урожая с использованием специального манипулятора, в отраслях ЖКХ или решать вопросы по благоустройству территорий. Мелкосерийное производство умной машины ожидается уже к концу 2022 года.
Роботы на улицах
– Была идея создать настолько универсальную платформу, что, расширив или дополнив набор её основных модулей, стало бы возможно применять агрегат в самых разных сферах. Изобрести такую платформу мы смогли за год! Достигнуть универсальности удалось за счёт аппаратной части – универсального шасси, позволяющего использовать его в различных погодных условиях. Важной задачей для нас была и навигация прототипа, которую решили за счёт технологии машинного зрения, – поясняет доцент кафедры «Система автоматизированной поддержки принятия решений» ТГТУ Артём Обухов.
Благодаря высокой манёвренности умную машину можно внедрить не только в сферу АПК. Универсальность изобретения позволяет занять и такую нишу как облагораживание городской и частной территорий, и один из вариантов – уборка снега. Такой технический тандем всё также будет решаться за счёт использования дополнительных модулей.

Похожие разработки, конечно, есть и в нашей стране, и за рубежом. Артём Обухов говорит, что существует множество автономных роботов, платформ, направленных на решение конкретных отдельных задач. В них также используются современные информационные технологии, машинное зрение.
В рамках тамбовского проекта было интересно реализовать универсальный подход. Поэтому разработка остаётся по-своему уникальным решением задачи, которая может найти применение в различных сферах деятельности, например, по курсу импортозамещения. К слову, проект совместно реализуют учёные и студенты нескольких направлений.
– Сейчас продолжаем работу с более компактной версией прототипа для отработки и тестирования алгоритмов машинного зрения и навигации. Разработка полноценной и полномасштабной версии платформы с высокой степенью проходимости – следующий этап в нашей работе. Полномасштабная версия будет проходить тестирование в реальных условиях: в садах и на полях фермерских хозяйств, придомовых территориях, – уточняет доцент кафедры.

Не только умная, но и компактная
Разработка имеет традиционную для подобных роботов компоновку: две пары колёс или гусеничную основу повышенной проходимости, сверху – аккумулятор и «мозг» изобретения. Предполагается использование множества датчиков и камер, в том числе лидара (технология получения и обработки информации об удалённых объектах с помощью активных оптических систем – примечание автора), который позволяет более точно строить карту окружающего пространства и обнаруживать препятствия.
– Это будет компактная машина длиной не более одного метра и высотой около полуметра. В столице компания Яндекс внедряет доставку еды роботами, визуально наша разработка чем-то их напоминает. Сейчас нам интересно испытать гусеничную основу, что машине даст самую высокую проходимость. Гусеничным лентам не страшна ни грязь, ни плохие дороги. В теории можно использовать колёса тех же мотоциклов, небольших автомобилей, – добавляет Артём Обухов.
Умная «начинка» универсальной платформы состоит из двух основных системных плат. Одна управляет движением колёс, вторая – интеллектуальной обработкой данных. К машине для этого крепятся камеры, которые считывают изображение, анализируют объекты и только потом маневрируют в поисках свободного маршрута. На полноценный прототип будет добавлена ещё камера кругового обзора.

– Используем технологию машинного зрения – камеры, которые позволяют распознавать объекты. Программа способна анализировать изображение и считывать его – находить объекты, выделять их и отличать, скажем, от преград. Задаём программное обеспечение с использованием машинного зрения, и траектория платформы выстроится так, чтобы робот аккуратно проехал мимо деревьев, но при этом с помощью манипулятора собрал плоды. Сейчас занимаемся реализацией полноценной системы управления на основе технологий машинного зрения.
Планируется выпускать платформы двух образцов – с электро- и бензиновым двигателями. Версия будет зависеть от предпочтений производителя. Но есть понимание, что климатическим условиям нашей страны не всегда подходит первый вариант. В этом вопросе рыночные риски обязательно будут учтены.
Серийное производство
В ТГТУ планируют к концу года презентовать полномасштабную версию платформы. Сейчас ведётся разработка конструкторской документации, специалисты занимаются изготовлением корпусных деталей, шасси. Практически всё здесь делают своими руками. Задействовано большое количество специалистов и мастеров университета.
– Сборка платформы организована на базе центра коллективного пользования «Цифровое машиностроение», где в настоящее время реализуется много проектов, в том числе и наш. Университет обладает достаточно мощным оборудованием по работе с металлом, есть фрезерные и токарные станки. Конечно, часть деталей придётся закупать – те же двигатели и камеры, – но сборка и изготовление крупных узлов в целом ляжет на наши плечи. Прототип полномасштабной платформы в металле будем изготавливать самостоятельно, – комментирует Артём Обухов.

Управлять умной машиной сможет любой специалист, для этого не придётся получать дополнительное образование или проходить какие-то курсы. Тамбовские учёные стараются максимально упростить изобретения до автоматического режима.
На прототипе уже оттестировали работу в ручном управлении с гаджета. Работать можно будет как с самой обычной игрушкой на пульте, а основных движений всего четыре – влево и вправо, вперёд и назад. Такой сценарий подойдёт и для платформы, оснащённой манипуляторами, как в сфере сельхозотрасли, так и в коммунальном хозяйстве. По словам Артёма, останется только запустить робота на городской улице или в полях – и наблюдать, как платформа работает:
– Серийное производство уникальной разработки планируем начать в конце 2022 года. Сейчас создадим портативный демо-образец и займёмся разработкой программного обеспечения. Выпускать серийное производство, скорее всего, будем на той же базе центра коллективного пользования «Цифровое машиностроение». Масштабным же производством займутся заводы и предприятия.
В ближайших планах – разработка полномасштабного прототипа платформы, испытания в реальных условиях и начало мелкосерийного производства в сотрудничестве с партнёрами, в том числе из НОЦ мирового уровня «Инженерия будущего».
Американские инженеры научились управлять дроном мышцами руки
За последние несколько лет дроны стали частью современной технологической жизни. Это уже давно не просто развлечение: дроны широко используют в военной сфере, для доставки товаров, люди устраивают соревнования (гонки) на них. Кстати, именно дроны стали одним из эффективных способов отслеживать больных с коронавирусом и людей на карантине в Сингапуре и других наиболее развитых городах мира. В большинстве случаев управление такими устройствами осуществляется при помощи стиков на пульте управления, однако инженеры из США смогли настроить дрон так, чтобы он реагировал на сокращения мышц в человеческой руке.
Интересно, автомобилями они тоже так управлять умеют?
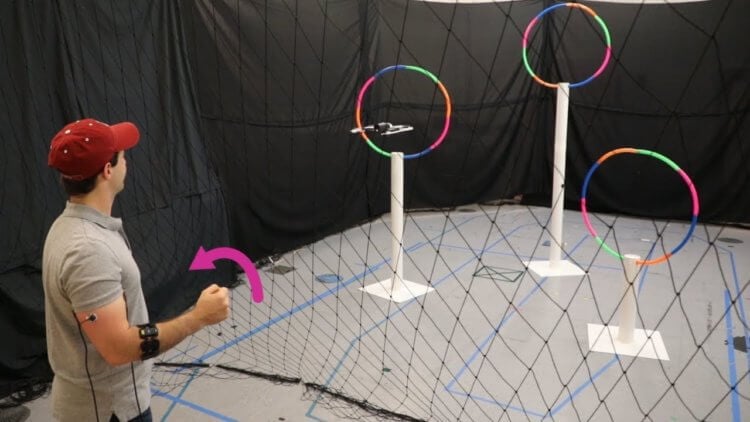
Управление дроном жестами
Исследователи из Массачусетского технологического института (MIT) создали специальный контроллер, который считывает движения руки и активность мышц, а затем превращает полученные данные в команды для дрона. Например, если человек с надетым браслетом сделает движение кистью вправо, дрон повторит это за ним и повернет направо. При движении вверх — дрон наберет высоту, и так далее.
Чтобы это реализовать, ученые разместили на предплечье электродный браслет, а также закрепили над бицепсом и трицепсом две пары электродов. Браслет измеряет активность мышц в районе предплечья, а электроды — мышц, которые располагаются чуть выше. Таким образом устройство охватывает почти все мышцы руки. При движении мышечных клеток возникает электрический потенциал, который и стал основой нового вида управления дроном. Посмотрите, как это работает.
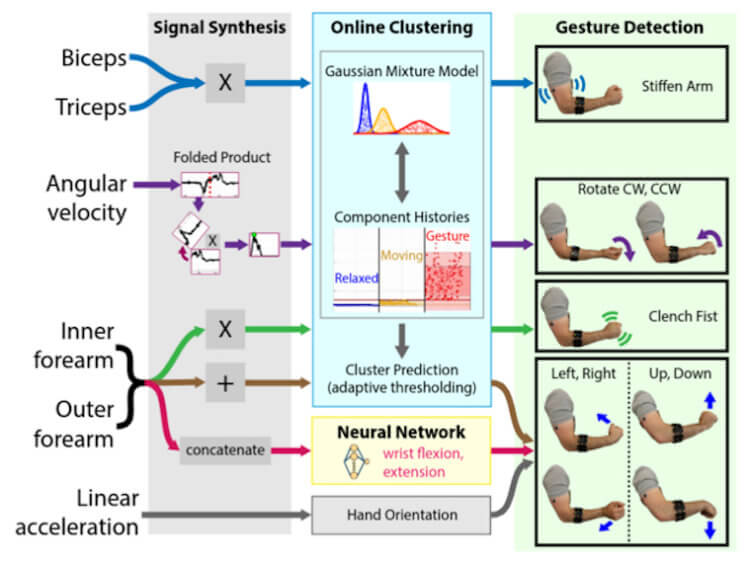
Для распознавания жестов инженеры специально разработали набор алгоритмов, а чтобы дрон понимал, когда кулак отклоняется в сторону, была создана нейросеть.
Управлять дроном можно с помощью четырех видов жестов. Поворот кулака позволяет передвигать дрон вверх, вниз, влево или вправо соответственно. Чтобы начать движение вперед, оператор должен просто сжать кулак, чтобы остановиться — сжать мышцы в районе плеча. Кроме того, дрон способен вращается вокруг вертикальной оси, достаточно просто повращать кулаком (как на утренней зарядке). Исследователи утверждают, что главное преимущество их решения в том, что браслет и набор электродов не нуждаются в калибровке каждый раз, когда человек захочет управлять дроном таким способом. То есть даже я или вы можете надеть его, и система все равно будет корректно распознавать все движения мышц. В процессе испытаний инженеры сделали более 1 500 жестов — точность их распознавания дроном составила 82%.
Можно было догадаться, что без нейросетей здесь не обошлось
На самом деле это не первая попытка ученых управлять дронами с помощью жестов. Соответствующие наработки есть даже у крупных производителей квадрокоптеров (той же DJI) — дрон уже способен сам лететь за хозяином и даже понять его движения, однако все эти системы работают на основе камеры. В темноте или на большом расстоянии задействовать подобный способ управления просто невозможно. Другое дело — устройства для отслеживания движения рук, которые способны отслеживать жесты по показаниям акселерометра и гироскопа. Но и у них есть сильная погрешность, если, например, человек сделает несколько движений подряд. В случае с американскими инженерами из MIT погрешность минимальная, и дрон может работать даже в полной темноте. Правда, максимальную дистанцию работы ученые не раскрывают. Подпишитесь на нас в Google Новостях, чтобы узнавать первыми новости о таких проектах.
А вы знали, что дроны могут помочь человечеству в борьбе с глобальным потеплением? Вот, каким образом.
Где можно использовать дрон
Зачем это нужно? Например, полиция устроила погоню за нарушителем и решила задействовать дрон. Офицер может за несколько секунд разместить у себя на руке подобный браслет, запустить дрон и управлять им не с помощью пульта, а мышцами своей руки. При пеших погонях такая тема точно пригодится. И было бы еще круче, если бы у полицейского было устройство наподобие Google Glass, где он смог бы отслеживать картинку с камеры дрона.
Платформа-конструктор: как создать ИТ-инфраструктуру без программистов?
CNews: Что ожидают заказчики от ИТ-вендоров и интеграторов сегодня и что изменилось в подходе поставщиков решений?
Александр Гелик: Ожидания заказчиков и системных интеграторов связаны в первую очередь с возможностью сократить сроки внедрения программных решений и снизить стоимость владения ими. Конечным клиентам нужен конструктор для проектирования бизнес-приложений, который не требует привлечения дорогостоящих программистов, создания большого проекта разработки, а позволяет в кратчайшие сроки собрать прототип и проверить его эффективность. Предоставление клиентам таких возможностей и стало ответом поставщиков ИТ на их запросы. Системным интеграторам платформа нужна для тех же целей: быстро создать прототип и «примерить» его к бизнес-процессам заказчика в ходе пилотного проекта. После этого уже можно дорабатывать функциональность.
Второй запрос заказчиков – импортозамещение. Оно, помимо ряда других задач, позволяет сократить стоимость владения программными продуктами.
CNews: Как платформа поможет снизить стоимость владения ИТ?
Александр Гелик: Если сравнивать с западными аналогами, то наш продукт дешевле именно потому, что он отечественный. Мы выстроили лицензионную политику таким образом, чтобы было комфортно всем: и заказчикам, и партнерам-интеграторам, и нам. Причем речь идет о суммах значительно более низких, чем у иностранных решений. Стоимость владения включает в себя и затраты на техническую поддержку – она связана с лицензированием и точно так же обходится значительно дешевле по сравнению с западными системами.

Наша компания как вендор находится в России, поэтому мы всегда доступны при необходимости оказать поддержку. Более того, руководитель проекта, работавший с интегратором в период внедрения решения у клиента, продолжает работать с ним в рамках поддержки. Он знает особенности бизнеса клиента, может принимать более оперативные и правильные решения. Тем самым сокращается стоимость доработки, устранения возможных ошибок, а также снижается риск, что что-то не заработает как надо – это тоже влияет на затраты заказчика.
Еще один важный момент: наша low-code платформа Х360 ориентирована на аналитиков, а не на программистов. Поэтому большая часть изменений может быть выполнена на стороне заказчика силами его собственных специалистов очень быстро и без дополнительных затрат. Если понадобится более серьезное вмешательство, то поддержку может оказать интегратор, с которым у заказчика есть договор на сопровождение системы.
CNews: Каким образом ведется разработка программных продуктов на базе вашей платформы?
Александр Гелик: Во главе стоит методология Agile, которую мы используем при разработке и развитии платформы Х360 и совместно с нашими партнерами и заказчиками программных продуктов на ее базе. Эффект синергии получается благодаря вовлеченности всех участников процесса. Причем непосредственно «собирают» продукт не программисты, а сами заказчики – те же аналитики, которые понимают цели его применения и знают бизнес-процессы. Это и есть преимущество технологии low-code.
Повысить скорость и эффективность разработки позволяет подход, в соответствии с которым каждые одну-две недели назначаются так называемые «спринты» – временные отрезки с реализацией небольших готовых функциональных частей платформы или продукта, закрывающие определенные задачи. В первую очередь так и реализуют самую необходимую функциональность.
CNews: Какие именно продукты можно разрабатывать на платформе Х360?
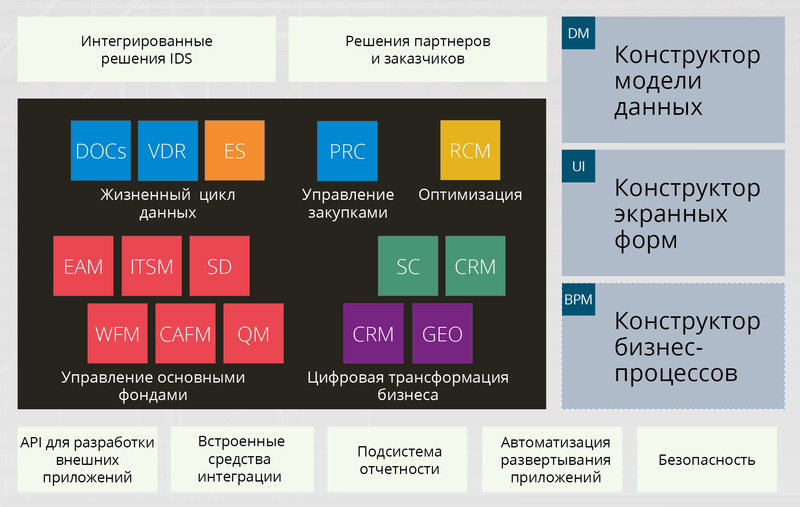
Александр Гелик: Платформа построена таким образом, что на ней можно спроектировать систему любого класса. В основе платформы лежат: конструктор модели данных – это инструмент для создания структуры будущего приложения, – затем конструктор создания экранных форм, с которым можно спроектировать любой интерфейс пользователя на основе модели данных, а также конструктор бизнес-процессов, позволяющий спроектировать и протестировать процесс. Кроме того, в платформе реализованы встроенные механизмы для высокопроизводительного поиска информации, формирования отчетности и интеграции.
Эти компоненты применяются для построения различных решений. Для каждого из них используют свой набор инструментов из всего спектра, предоставляемого платформой. Главное – это достаточная компетентность разработчиков-аналитиков, создающих программные решения. Если она на высоком уровне, то при построении, например, системы бизнес-аналитики можно подстроиться под конкретные требования заказчика и реализовать любую сложную логику. Или средствами платформы настроить интеграцию с платежной системой, если речь будет идти об информационных учетных системах с возможностью исполнения платежей.
Вариантов решений может быть очень много. Платформа Х360 позволяет реализовать весь цикл – от проектирования прототипа до создания и развития сложных систем. Если говорить об их разнообразии, то мы выделяем несколько направлений. Первое – управление жизненным циклом данных. К нему относятся все продукты, позволяющие управлять процессами создания, хранения, поиска и обработки данных: документов, нормативно-справочной информации, консолидированных данных из других систем. Управление жизненным циклом позволяет обеспечить доступность данных для сотрудников, которые с ними работают.
Второе направление – управление основными фондами. Мы его очень активно развиваем вместе с интегратором RedSys, поскольку эта компания-партнер обладает серьезными компетенциями в области Enterprise Asset Management – управления активами, от недвижимости и оборудования до сервисов и мобильных бригад. Предоставляя инструмент и основные функциональные блоки программных продуктов, мы помогаем развивать эти компетенции.
Платформа позволяет создавать серьезные решения, которые можно предлагать заказчикам, и для многих бизнес-процессов уже заготовлены шаблоны, позволяющие быстро их внедрить и при необходимости кастомизировать в ходе реального проекта.

Наше решение позволяет управлять и цифровыми активами, если говорить об ITSM. Для этих целей разработан «коробочный» продукт, позволяющий управлять ИТ-инфраструктурой, системами и т.д. В рамках построения таких решений мы можем использовать как сторонние системы, так и сконструированные самостоятельно.
Отдельно мы развиваем решение по управлению закупками, которое предусматривает автоматизацию закупочных процедур в соответствии с требованиями законодательства 44-ФЗ «О контрактной системе в сфере закупок товаров, работ, услуг для обеспечения государственных и муниципальных нужд». Мы выделили это направление как отдельное, потому что вели в партнерстве с RedSys серьезный масштабный проект в крупном государственном заказчике и имели проектную команду, задачей которой и была разработка решения со специализированной функциональностью. С учетом востребованности на рынке создание отдельного продукта на базе этой разработки было логичным решением.
CNews: Какие еще системы можно создавать на базе Х360?
Александр Гелик: Я назвал три основных направления – управление жизненным циклом данных, управление основными фондами и управление закупками. Помимо них, можно автоматизировать корпоративные бизнес-процессы различного профиля, в том числе конструировать системы автоматизации деятельности ситуационных центров, управления качеством продукции, а также CRM и другие.
Стоит добавить, что в рамках управления основными фондами мы развиваем и тему управления надежностью оборудования. Она, в частности, интересна нашим партнерам из RedSys, обладающим богатым проектным опытом в этой сфере, потому что системы класса Reliability Centered Maintenance позволяют оптимизировать план работ по обслуживанию оборудования. Оптимизация может быть весьма существенной, особенно когда компания хочет перейти от системы плановых ремонтов к ремонту оборудования «по состоянию».

Как правило, это влечет за собой значительную экономию, снижение рисков выхода оборудования из строя и оптимизацию персонала, занятого на обслуживании. Поэтому системы класса RCMстановятся все более востребованными среди заказчиков, и мы включили развитие управления надежностью в число наших приоритетов.
CNews: Позволяет ли Х360 интегрировать готовые вендорские решения?
Александр Гелик: Платформа X360 – это не только платформа-конструктор. Она же может быть и интеграционной платформой, позволяющей связать несколько систем в рамках единого информационного пространства. Единое пространство позволяет более эффективно управлять процессами в компании. Ведь в чем обычно заключается проблема: есть функциональный заказчик, системный аналитик и программист. Каждый из них смотрит на аналитическую систему со своей стороны и понимает стоящие задачи по-своему. В нашем случае аналитик может лучше понять задачи заказчика и самостоятельно реализовать их в системе.
В этом разрезе мы можем говорить как о связке информационных систем с нашей платформой, так и о миграции имеющихся у заказчика систем на Х360. Компания может создать свой собственный программный продукт и не заботиться об интеграции, потому что все будет разработано на единой платформе. Таким образом, в частности, можно вполне комфортно реализовать план импортозамещения, если перед компанией стоит такая цель.
CNews: Что представляет собой партнерская программа в отношении проектных решений и развития продуктов на базе платформы Х360?
Александр Гелик: Партнерская программа предусматривает несколько пунктов. Так, мы проводим обучение специалистов. Оно бывает общее, чтобы аналитики и разработчики узнали о возможностях платформы и основных инструментах конструкторов применительно к своей роли на проекте и в системе. Обучение также бывает специализированное, направленное на менеджеров компании-партнера, которым предстоит продавать платформу и программные решения своим клиентам. И, наконец, мы проводим обучение по каждому из продуктов – либо по общим для всех направлениям, либо по особенностям конкретного проекта.
Если речь идет о создании новых продуктов, мы придерживаемся различных подходов. При необходимости мы изучаем потребность рынка, можем создать новый продукт и впоследствии предлагать его нашим партнерам и заказчикам. Партнерам такой подход выгоден, потому что мы расширяем охват потенциальных клиентов, с которыми они потом смогут работать. Второй вариант – берем базовые функциональные возможности платформы и соответствующих продуктов и настраиваем их в соответствии с условиями проекта.
Мы ищем и находим с партнерами устраивающие всех условия договоров, чтобы наше взаимодействие было максимально комфортным. И мы активно участвуем в работе партнера с заказчиком. Участие в проекте – одно из наших ключевых условий, позволяющее поддержать партнера и реализовать проект максимально успешно. Для IDS очень важен постоянный контакт с компаниями-партнерами и оказание им соответствующей поддержки.
Нейроинтерфейс: управлять силой мысли
Нейроинтерфейс делает возможным то, что еще недавно считалось фантастикой – обмен информацией между мозгом и внешним устройством, то есть управление объектами силой мысли. В России есть несколько организаций, которые плотно занимаются изучением данной технологии. Уже в этом году нейроинтерфейс планирует выпустить в продажу концерн «Автоматика» Госкорпорации Ростех.
О том, как управлять реальностью силой мысли, об истории данной технологии и современных разработках – в нашем материале.
Нейроинтерфейс: посредник между мозгом и компьютером
Нейроинтерфейс (или интерфейс «мозг – компьютер») – так называется устройство для обмена информацией между мозгом и внешним устройством. В качестве объекта управления может выступать не только компьютер, но и любое другое электронное устройство: квадрокоптер, система «умного дома», промышленный робот или боевой дрон, экзоскелет и даже искусственные органы чувств.
Медицина на данный момент является основной областью применения нейроинтерфейсов. Здесь интерфейс «мозг – компьютер» открывает новые возможности в области протезирования и реабилитации инвалидов с различными моторными нарушениями. Например, после инсульта многие пациенты не могут говорить. В этой ситуации нейроинтерфейс выступает умным посредником между мозгом и внешней реальностью, единственным средством общения.
Парализованные пациенты с помощью такого устройства могут управлять протезом и инвалидной коляской или даже механическим экзоскелетом. Пожалуй, самое лучшее наглядное доказательство фантастических возможностей этой технологии произошло в 2014 году. Тогда Чемпионат мира по футболу в Бразилии открыл ударом по мячу Джулиано Пинто – человек с параличом нижних конечностей. Сделал он это с помощью экзоскелета, управляемого силой мысли.

Нейроинтерфейсы уверенно входят в повседневную жизнь и расширяют области использования. Сегодня к технологии «мозг – компьютер» начинает проявлять интерес не только медицина, но и развлекательная отрасль с ее компьютерными «игрушками», промышленное производство, устройства «умного дома», роботехника.
Согласно исследованию Allied Market Research, рынок интерфейсов «мозг – компьютер» растет опережающими темпами и уже в 2020 году составит порядка 1,46 млрд долларов.
История отношений «мозг – компьютер»
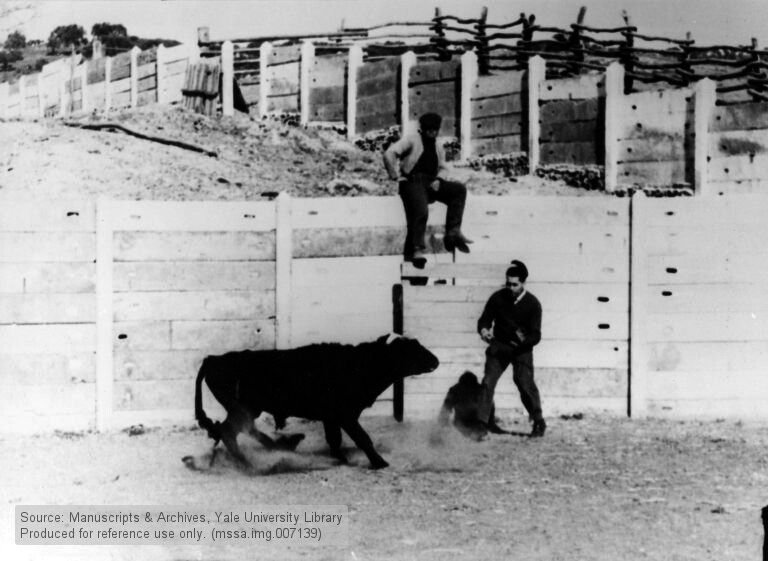
Можно сказать, что история интерфейса «мозг – компьютер» насчитывает более ста лет. Еще в 1875 году, задолго до изобретения самого компьютера, английский физиолог и хирург Ричард Кэтон обнаружил электрические сигналы на поверхности мозга животного. В 50-е годы прошлого века появился первый нейроинтерфейс. Им принято считать Stimoceiver – электродное устройство, которое управлялось по беспроводной сети с помощью FM-радио. Оно было изобретено испанским и американским ученым Хосе Дельгадо и испытано в мозге быка. Демонстрация возможностей нового устройства была очень эффектной – на арене для корриды. Дельгадо вышел против быка, а когда тот побежал на него, нажал кнопку на пульте управления – впервые удалось изменить направление движения животного с помощью нейроинтерфейса.
В 1998 году был внедрен первый нейроинтерфейс в мозг человека. Пациентом стал американский художник и музыкант Джонни Рей. Думая или представляя движения рук, Рей управлял курсором на экране компьютера.
Но настоящий прорыв случился несколько лет назад, когда появились достаточно мощные компьютеры и новые алгоритмы. Если раньше можно было расшифровывать только самые простые намерения, например, хочет человек пошевелить правой рукой или левой, то современный нейроинтерфейс может управлять даже отдельными пальцами протеза руки. Для этого нужно внедрить на участке мозга, отвечающем за движение рук, более 100 электродов.
Как это работает: не телепатия и не телекинез
Конечно, новые технологии предоставили новые невероятные возможности в этой сфере, но принципиальная идея нейроинтерфейса такая же, как и полвека назад. В интерфейсе «мозг – компьютер» нет ничего мистического: технология позволяет регистрировать электрическую активность мозга и преобразовывать ее в команды для внешних устройств.
«Это не телепатия и не телекинез: в нейроинтерфейсах мысленные команды человека расшифровываются по записи электрической активности его мозга, или электроэнцефалограммы. Той самой, которую записывают в каждой поликлинике», – объясняет психофизиолог Александр Каплан, завлабораторией нейрофизиологии и нейроинтерфейсов биологического факультета МГУ.
Считывание сигналов мозга производится с помощью инвазивных (вживляемых в мозг пациента) датчиков или неинвазивных датчиков, которые регистрируют ЭЭГ с поверхности головы.
Итак, для инвазивного нейроинтерфейса требуется операция: электроды вживляются прямо в кору мозга. Выглядят они как маленькая пластинка, примерно пять на пять миллиметров, которая покрыта сотнями иголочек-электродов. Они регистрируют электрическую активность отдельных нервных клеток в том месте, куда внедрены. Такие датчики отличаются более сильным сигналом, однако инвазийное вмешательство сопряжено с последствиями для здоровья человека. Даже отличные характеристики датчиков нового поколения могут вызвать ряд проблем: риск воспалений, необходимость повторной имплантации из-за отмирания нейронов и даже такие необъяснимые последствия, как эпилепсия. Поэтому такие интерфейсы используют в крайних случаях, для тяжелобольных пациентов, которым не могут помочь другие методы.
Неинвазивный нейроинтерфейс не предполагает вторжения в организм – электроды прикрепляют к коже головы. Несмотря на то что мозг располагается глубоко в черепе, электрические поля, создаваемые нервными клетками, улавливаются электродами на поверхности головы. Этот метод уже давно применяется при снятии электроэнцефалографии. С использованием нейрогарнитуры возможно построить интерфейс «мозг – компьютер», обеспечивающий точность распознавания команд пользователя до 95%.

В свою очередь, неинвазивные нейроинтерфейсы могут быть на «мокрых» и «сухих» электродах. В первом случае электроды с подушечками нужно смачивать и лишь затем прикреплять к голове. Как известно, жидкость служит проводником электричества и облегчает снятие данных. Однако у такого метода есть недостатки, и это не только мокрые волосы.
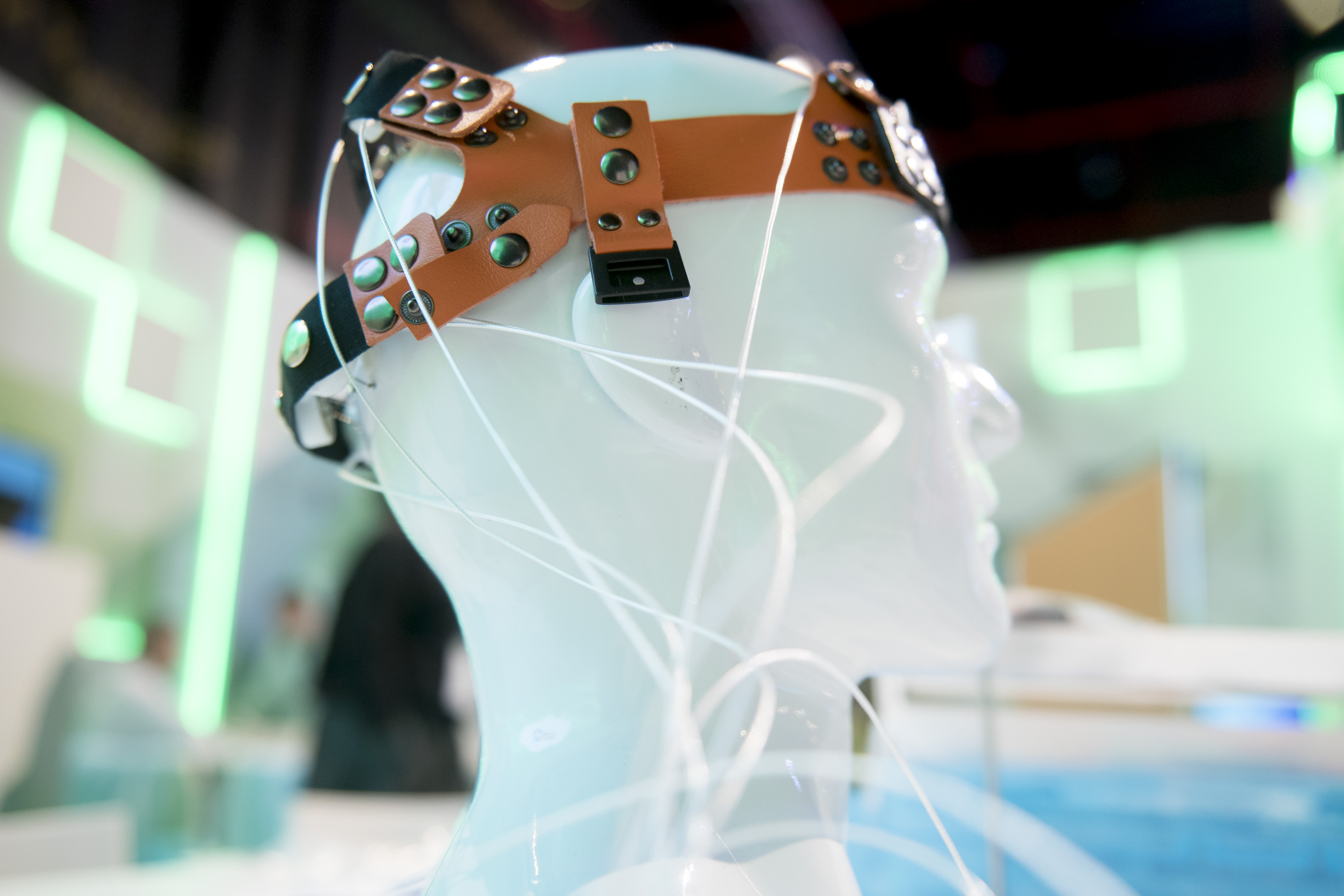
Нейроинтерфейсы на сухих электродах выглядят в виде шлема, который можно легко надеть без какой-либо дополнительной помощи и подготовки. Специальные электроды не требуют использования электропроводящего геля, при этом высокое качество регистрируемого сигнала обеспечивает система активного подавления помех. К примеру, подобный нейроинтерфейс разработал концерн «Автоматика» Госкорпорации Ростех.
BrainReader российского производства
Предсерийный образец шлема-нейроинтерфейса в прошлом году был представлен на выставке БИОТЕХМЕД. Над созданием технологии работал Институт электронных управляющих машин (ИНЭУМ) им. И.С. Брука, входящий в состав концерна «Автоматика».
В разработке реализован механизм адаптивной цифровой обработки электрической активности мозга и неинвазивный метод снятия данных на основе сухих электродов.
Одно из главных преимуществ – удобство применения. Интерфейс встроен в специальный шлем, который можно легко снять и надеть любой человек без дополнительной помощи. Сухие электроды не нужно смачивать электропроводящим гелем.

Точность обработки сигнала при этом не падает даже в местах большого скопления людей, в транспорте, в окружении большого числа передающих устройств. Специально для этого была создана программно-аппаратная платформа, обрабатывающая сигналы и «очищающая» их от помех. Электроды нейроинтерфейса – это, фактически, антенна, которая ловит весь эфир. При этом сигналы, идущие от мозга, слабее естественного шума. Специальный алгоритм обработки этих сигналов является одной из ключевых особенностей отечественной разработки.
Ожидается, что шлем-нейроинтерфейс выпустят в продажу уже в 2019 году. При этом «Автоматика» планирует вывести новинку и на международный рынок, под названием BrainReader. Как считают эксперты, устройство имеет хороший экспортный потенциал. Ближайший по характеристикам конкурент – американская нейрогарнитура – стоит примерно в три раза дороже.
Концерн «Автоматика» уже приступил к получению разрешительной документации для выхода на рынки стран Азии. Предложения от азиатских компаний, в частности из Индонезии и Малайзии, о дистрибуции BrainReader поступили по результатам участия в выставке Medlab AsiaPacific & Asia Health 2019, где возможности российского устройства вызвали большой интерес.
События, связанные с этим
Как пережить карантин: семь решений от Ростеха
Цифровой сервис: криптобиокабина ускорит получение загранпаспорта
Нейроинтерфейс: управлять силой мысли
Ловушка для дрона: как вывести из строя беспилотник
