
Впервые создан робот, весь состоящий из живых клеток
Ученые из Университета Вермонта в США, опубликовали отчет о создании первого в мире робота, состоящего полностью из живых клеток. Об этом сообщается на официальном сайте университета.
Пока эти новые роботы имеют размер всего в один миллиметр, однако при этом обладают уникальными свойствами. Они могут двигаться к нужной цели по команде, захватывать с собой груз (например, лекарство) и доставлять его в необходимое место, а также полностью самовосстанавливаться после повреждений.

Это изобретение может в значительной мере повлиять на прогресс человечества, потому что открывает целое новое направление в робототехнике и медицине. В перспективе роботы могут быть живыми и состоять из мышц, как человек, или, наоборот, человек может получить новые роботизированные мышцы и органы в замен поврежденных. Кроме этого, микроскопические роботы могут, например, двигаться по сосудам, восстанавливая их.
Команда ученых, которая создала новых живых роботов, назвала их ксеноботами. Клетки были взяты из эмбрионов лягушки и перераспределены в совершенно новые формы жизни.
– Это новые живые машины, – рассказывает специалист по компьютерным технологиям и робототехнике в Университете Вермонта Джошуа Бонгард, который был одним из руководителей нового исследования. – Они не являются ни традиционным роботом, ни известным видом животных. Это новый класс артефактов: живой, программируемый организм.

По заявлению ученых, новые существа были разработаны на суперкомпьютере в UVM, а затем собраны и протестированы биологами в Университете Тафтса (штат Массачусетс, США).
– Мы можем представить себе множество полезных применений этих живых роботов, которые не могут сделать другие машины, – говорит руководитель Центра регенеративной биологии и биологии развития в Тафтсе Майкл Левин. – Например, поиск опасных соединений или радиоактивного загрязнения, сбор микропластика в океанах. Также ксеноботы могут курсировать по артериям человека, чтобы вычищать образующийся там налет.
Новые живые роботы строились из клеток, которые были собраны у эмбрионов африканских лягушек, вида Xenopus laevis (отсюда и название – ксеноботы). Ученые проделали огромную работу, сохраняя и развивая те смоделированные организмы, которые работали хорошо, и удаляя неудачные проекты. В итоге телам новых роботов придали четыре “конечности” и небольшое углубление посередине. По форме они напоминают перевернутую табуретку, а их размер – чуть больше булавочной головки. Однако, эти тела с формой, которая никогда не встречается в природе, начали действовать совместно по воле человека и выполнять поступающие приказы.

– Ксеноботы полностью биоразлагаемы, – рассказывает специалист по компьютерным технологиям и робототехнике в Университете Вермонта Джошуа Бонгард, – После того как они закончили свою работу, через семь дней они становятся просто мертвыми клетками кожи и могут быть легко утилизированы, не нанося вред экологии.
Еще одним уникальным свойством живых роботов является их возможность полной регенерации, что потенциально открывает путь к бессмертию человека.
– Возьмите ваш ноутбук. Это мощная вычислительная техника. Но разрежьте его пополам – и он не будет работать, – рассказывает Джошуа Бонгард. – В своих экспериментах мы разрезали ксеноботов почти пополам и наблюдали за тем, что происходило. Они снова сами сшиваются и продолжают действовать. Это уникальное свойство, которым не обладают типичные машины.
Как устроены современные роботы и как они помогают изучать мозг человека
Материал предоставлен РБК Трендам порталом HSE.RU.
Роботы интересны нейронаукам, а нейронауки интересны роботам — об этом была наша статья «Neuroengineering challenges of fusing robotics and neuroscience» в журнале Science Robotics. Такое совместное развитие способствует прогрессу в обеих отраслях, приближая нас к созданию более совершенных роботов-андроидов и к более глубокому пониманию устройства нашего мозга. А в какой-то степени — к объединению биологических организмов с машинами, к созданию кибернетических организмов (киборгов).
Нейронаука для роботов
По своему устройству роботы нередко копируют человека. Это касается той части роботов, которым важно имитировать человеческие действия и поведение — индустриальным машинам нейронауки не так важны.
Самое очевидное, что могут использовать при разработке робота — делать его внешне похожим на человека. Роботы часто имеют две руки, две ноги и голову, даже если это не обязательно с инженерной точки зрения. Особенно это важно в тех случаях, когда робот будет взаимодействовать с людьми — похожей на нас машине проще доверять.
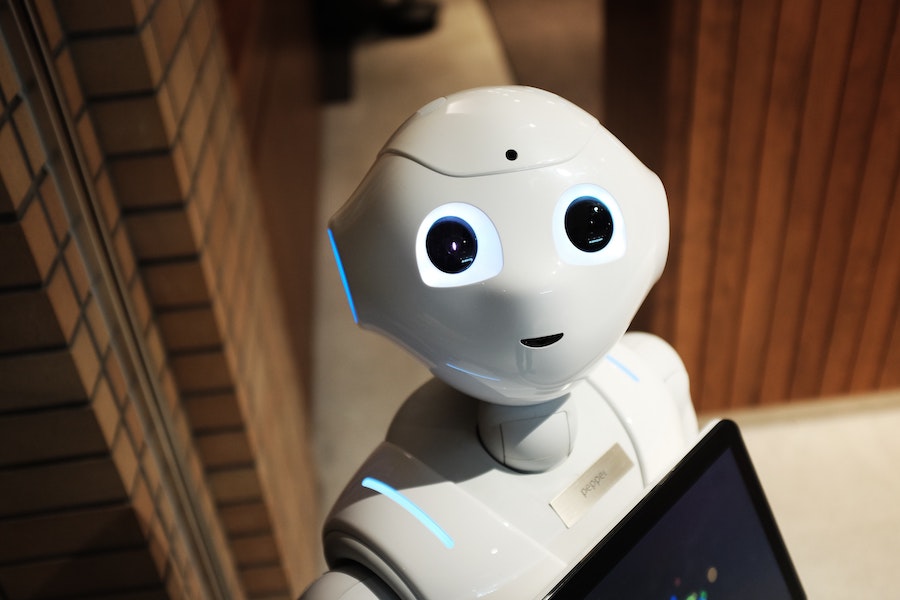
Можно сделать так, чтобы не только внешний вид, но и «мозг» робота был похож на человеческий. Разрабатывая механизмы восприятия, обработки информации и управления, инженеры вдохновляются устройством нервной системы людей.
Например, глаза робота — телекамеры, которые могут двигаться в разных направлениях — имитируют зрительную систему человека. Опираясь на знание о том, как устроено зрение человека и как происходит обработка зрительного сигнала, инженеры проектируют сенсоры робота по тем же принципам. Таким образом робота можно наделить, например, человеческой способностью видеть мир трехмерным.
У человека есть вестибулоокулярный рефлекс: глаза при перемещении стабилизируются с учетом вестибулярной информации, что позволяет сохранять стабильность картинки, которую мы видим. На теле робота также могут быть датчики ускорения и вертикализации. Они помогают роботу учитывать движения тела для стабилизации зрительного восприятия внешнего мира и совершенствования ловкости.
Кроме того, робот может ощущать точно так же, как человек — на роботе может быть кожа, он может чувствовать прикосновение. И тогда он не просто произвольно движется в пространстве: если он дотрагивается до препятствия, он его ощущает и реагирует так же, как человек. Он может использовать эту искусственную тактильную информацию и для схватывания предметов.
У роботов можно имитировать даже болевые ощущения: какое-то прикосновение ощущается нормально, а какое-то вызывает боль, что в корне меняет поведение робота. Он начинает избегать боли и вырабатывает новые модели поведения, то есть обучается — как ребенок, который впервые обжегся чем-то горячим.
Не только сенсорные системы, но и управление своим телом у робота можно спроектировать по аналогии с человеком. У людей ходьбой управляют так называемые центральные генераторы ритма — специализированные нервные клетки, предназначенные для контроля автономной моторной активности. Есть роботы, в которых для управления ходьбой была использована та же идея.
Кроме того, роботы могут обучаться у людей. Робот может совершать действия бесконечным числом способов, но если он хочет имитировать человека, он должен наблюдать за тем, как человек это делает, и пытаться повторить это движение. При совершении ошибок он сравнивает это с тем, как это же действие совершает человек.
Роботы для нейронауки
Как может использовать роботов нейронаука? Когда мы изготовляем модель биологической системы, мы начинаем лучше понимать, по каким принципам она работает. Поэтому создание механических и компьютерных моделей управления движениями нервной системой человека приближает нас к пониманию нервных функций и биомеханики.
А наиболее перспективное направление использования роботов в современной нейронауке — это проектирование нейроинтерфейсов, систем для управления внешними устройствами с помощью сигналов мозга. Нейроинтерфейсы необходимы для разработки нейропротезов (например, искуственной руки для людей, лишившихся конечности) и экзоскелетов — внешних каркасов тела человека для увеличения его силы или восстановления утраченной двигательной способности.
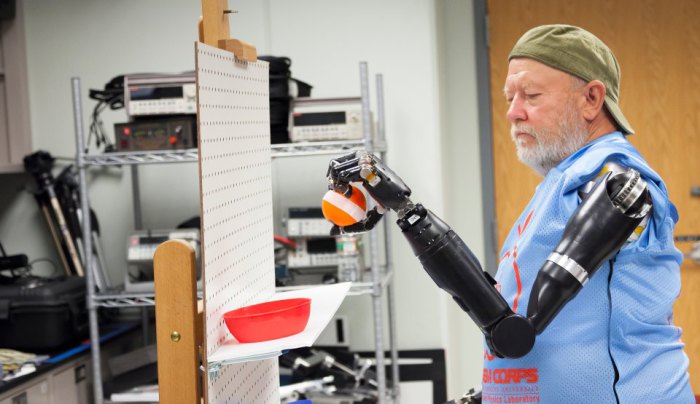
Робот может взаимодействовать с нервной системой через интерфейс в двух направлениях: нервная система может подавать командный сигнал роботу, в робот от своих сенсоров может подавать человеку сенсорную информацию, вызывая реальные ощущения — за счет стимуляции нервов, нервных окончаний кожи, или самой сенсорной коры мозга. Такие механизмы обратной связи позволяют восстановить чувствительность конечности, если она была утрачена. Они также необходимы для более точных движений роботизированной конечностью, так как именно на основе сенсорной информации от рук и ног мы корректируем движения.

Здесь возникает интересный вопрос — следует ли нам управлять через нейроинтерфейс всеми степенями свободы робота, то есть насколько конкретные команды мы должны ему посылать. Например, можно «приказать» роботизированной руке взять бутылку воды, а конкретные операции — опустить руку, повернуть ее, разжать и сжать пальцы — она совершит сама. Этот подход называется совмещенным контролем — через нейроинтерфейс мы даем простые команды, а специальный контроллер внутри робота выбирает наилучшую стратегию для реализации. Либо можно создать такой механизм, который не поймет команды «взять бутылку»: ему нужно посылать информацию о конкретных, детализированных движениях.
Современные исследования
Ученые в области нейронаук и робототехники изучают различные аспекты работы мозга и устройства роботов. Так, в университете Дьюк я проводил эксперименты с нейроинтерфейсами на обезьянах — так как для точной работы интерфейсов необходимо их прямое подключение к зонам мозга и не всегда такие экспериментальные вмешательства возможны на людях.
В одном из моих исследований обезьяна ходила по дорожке, активность ее моторной коры ее мозга, ответственной за движение ног, считывалась и запускала ходьбу робота. При этом обезьяна наблюдала этого ходящего робота на экране, который был перед ней расположен.
Обезьяна использовала обратную связь, то есть корректировала свои движения на основе того, что она видит на экране. Таким образом разрабатываются наиболее эффективные для реализации ходьбы нейроинтерфейсы.
Кибернетическое будущее
Подобные исследования ведут нас к инновационным разработкам в будущем. Например, создание экзоскелета для восстановления движений у полностью парализованных людей уже не кажется недостижимой фантазией — необходимо только время. Этот прогресс может сдерживать недостаточная мощность компьютеров, но за последние десять лет развитие и здесь было колоссальным. Вполне вероятно. что скоро мы увидим вокруг людей, которые используют для передвижения не коляски, а легкий, удобный экзоскелет. Люди-киборги станут для нас чем-то обыденным.
Коммерческая разработка таких систем идет по всему миру, в том числе и в России. Например, в известном проекте ExoAtlet разрабатывают экзоскелеты для реабилитации людей с двигательными нарушениями. Центр биоэлектрических интерфейсов НИУ ВШЭ поучаствовал в разработке алгоритмов для этих машин: директор Центра профессор Алексей Осадчий и его аспиранты разработали нейроинтерфейс, запускающий шагательные движения экзоскелета.

Быстрое развитие человекоподобных роботов-андроидов тоже становится реальностью. Вполне вероятно, что скоро вокруг нас будут ходить роботы, которые будут имитировать нас во многих аспектах — двигаться как мы и думать как мы. Они смогут выполнять часть работы, прежде доступной только человеку.
Очевидно, что мы будем видеть развитие и робототехники, и нейронаук, и эти области будут сближаться. Это не только открывает новые возможности, но и создает новые этические вопросы: как мы должны относиться к роботам-андроидам или людям-киборгам.
И все-таки пока человек лучше, чем робот, во многих отношениях. Наши мышцы наиболее экономичны: достаточно съесть бутерброд, чтобы хватило энергии на весь день. У робота заряд батарей закончится через полчаса. И хотя может быть гораздо мощнее, чем человек, он часто оказывается слишком тяжелым. Элегантность и оптимизация энергетических затрат — тут человек пока превосходит робота.
Хотя недалеко то будущее, когда это изменится — в этом направлении работают десятки тысяч талантливых ученых и инженеров.
Подписывайтесь также на Telegram-канал РБК Тренды и будьте в курсе актуальных тенденций и прогнозов о будущем технологий, эко-номики, образования и инноваций.
Голактеко опасносте: ДНК-роботы в живом организме
- 1349
- 1,0
- 2
- 1
Рисунок-аллегория: стереотипы и страх людей перед новыми технологиями
Автор
 Антон Сергеев
Антон Сергеев
 Антон Сергеев
Антон СергеевРедакторы
- Антон Чугунов
- Андрей Панов
 Антон Чугунов
Антон Чугунов Андрей Панов
Андрей Панов- «Сухая» биология
- ДНК
- Нано(био)технологии
В эпоху электронно-вычислительных машин трудно представить, что помочь человеку в решении его задач может что-либо помимо мощного компьютера. Квантовые компьютеры все ещё являются экзотикой, недоступной простым смертным. А слышали ли вы о молекулярных компьютерах? Прошло два десятка лет с тех пор, как ученые впервые решили математическую задачу при помощи ДНК. На сегодняшний день ученым удалось продвинуться в этом направлении гораздо дальше — работу программируемых нанороботов уже тестируют на тараканах. Вы всё еще думаете, что будущее далеко? Тогда мы идем к вам!
Коллектив ученых из Израиля и США поставил уникальный эксперимент — запустил нанороботов в живых тараканов и показал эффективную работу созданных ими конструкций. На деле они создали логические схемы, реализующие разные исходы в зависимости от молекулярного окружения. Результаты опубликованы в журнале Nature Nanotechnology [1].
Нанороботы — это специальным образом сконструированные объекты нанометрового масштаба, состоящие из различных молекул или даже отдельных атомов и выполняющие заранее заданные программируемые операции. В большинстве своем они представляют собой простейшие молекулярные машины, способные выполнять небольшой набор элементарных действий, — например, движение в заданном направлении, перенос груза и сенсорные функции. Огромный толчок в развитии данного научного направления дало возникновение ДНК-оригами, о котором мы уже писали довольно подробно в статье «ДНК-оригами: путь от гравюры до нанороботов длиной в 30 лет» [2]. Использование ДНК-оригами предоставило ученым надежный инструмент для построения молекулярных конструкций практически любой сложности.
В своей работе ученые сконструировали три типа нанороботов: эффекторный робот E, который нес в себе в качестве груза антитело, специфически связывающееся с клетками крови тараканов , и два робота-регулятора — позитивный P и негативный N (рис. 1). При помощи этих элементов, специфически взаимодействующих между собой и с веществами в окружающей среде, ученым удалось собрать набор логических вентилей (гейтов) (рис. 2). Логические вентили представляют собой базовые элементы цифровой схемы и применяются для выполнения элементарных логических операций. Они давно используются человеком в информационных технологиях, и лежат в основе архитектуры компьютеров.
Мы, конечно же, знаем, что у членистоногих, к которым относитятся и тараканы, не кровь, а гемолимфа, но в этой статье для удобства будем использовать всем привычное слово «кровь». — Ред.
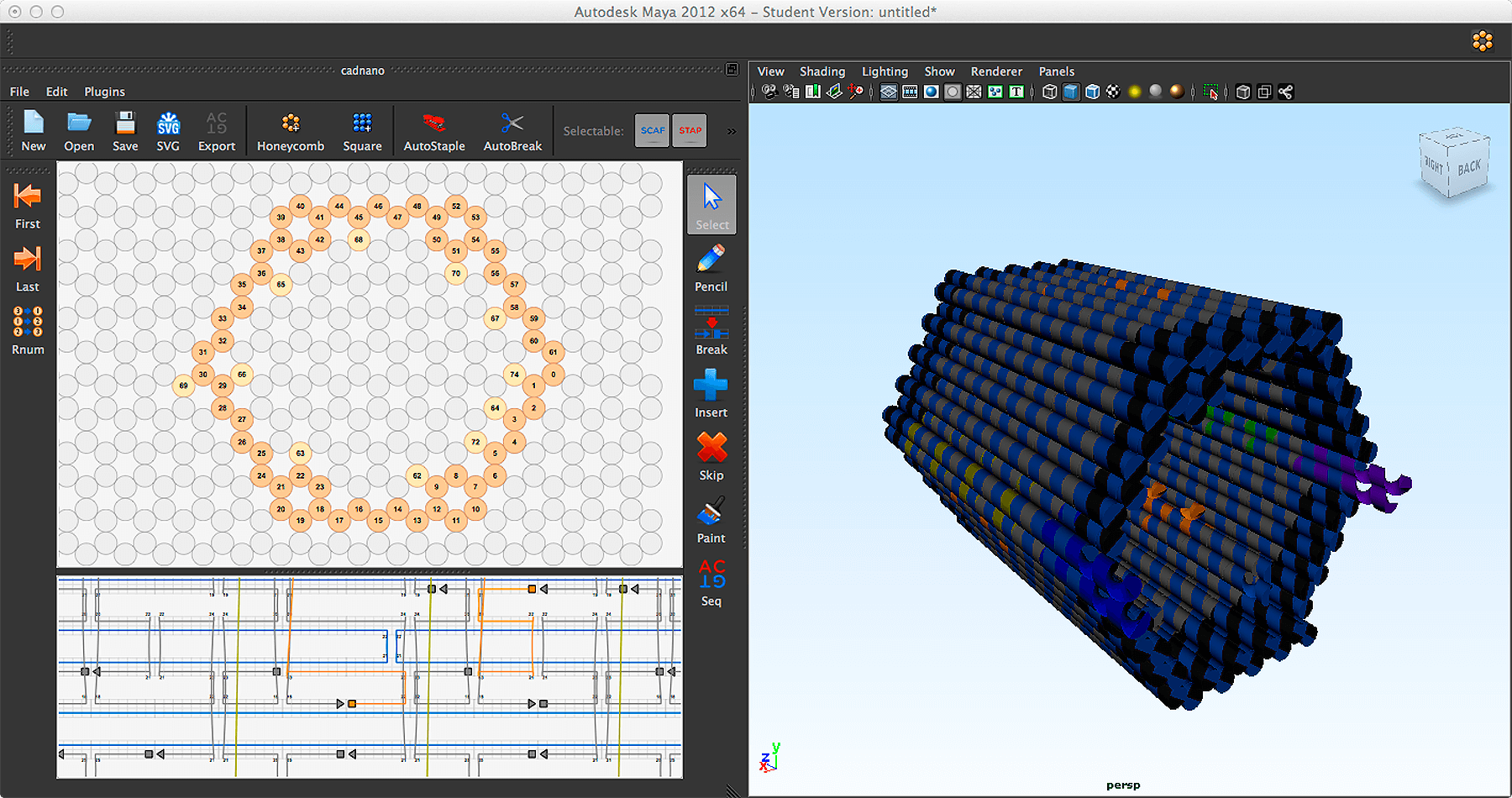
Рисунок 1. Эффекторный робот Е представляет собой шестигранную призму, внутри которой спрятан «важный груз» — в данном случае, антитело, способное связываться с клетками крови тараканов. На рисунке представлен скриншот программы caDNAno, позволяющей моделировать структуру ДНК-оригами и подбирать необходимые для конструкции нуклеотидные последовательности.
Слаженная работа эффекторного робота E и двух его регуляторов P и N имитировала работу простейших вычислительных машин, представляя собой довольно продвинутый вариант молекулярного компьютера или ДНК-компьютера. Взаимодействие между ДНК-роботами осуществлялось по принципу специфического связывания «ключ—замок», посредством которого они образовывали сложные комплексы.
В ходе эксперимента в кровь живого таракана добавляли раствор с нанороботами E, P и N. Оказавшись внутри организма, эффекторный робот E специфически взаимодействовал с молекулами X и Y (назовем их так, ведь в качестве X и Y могли выступать практически любые соединения) и претерпевал конформационный переход или, проще говоря, раскрывался. Раскрывшись, робот выпускал свой молекулярный груз — антитело, которое тут же распознавало гемоциты таракана и связывалось с ними. При этом для раскрывания робота и выпуска груза было необходимо присутствие в крови обоих соединений — и X, и Y.
Однако при наличии лишь одного соединения комплекс также мог раскрыться. Для этого ему требовалась помощь позитивного регулятора P. Этот робот нагружался ДНК-ключом, и, в зависимости от конструкции, высвобождал его при взаимодействии или с X, или с Y. ДНК-ключ открывал робота E и запускал процесс образования комплекса E—гемоцит. Наконец, негативный регулятор N при взаимодействии с обоими соединениями не позволял раскрыться эффекторному роботу E и выступал в качестве ингибитора образования комплекса с клеткой крови.
Все эти процессы могут быть проиллюстрированы при помощи логических схем и представлены в виде элементарных логических операций типа «И» (нужны и X, и Y), «ИЛИ» (нужен либо X, либо Y, либо оба соединения), «исключающее ИЛИ» (нужен либо X, либо Y, но не оба соединения). В качестве выходных параметров ЛОЖЬ (или 0) и ИСТИНА (или 1) здесь выступает наличие комплекса E—гемоцит. Эти и другие логические схемы представлены на рис. 2.
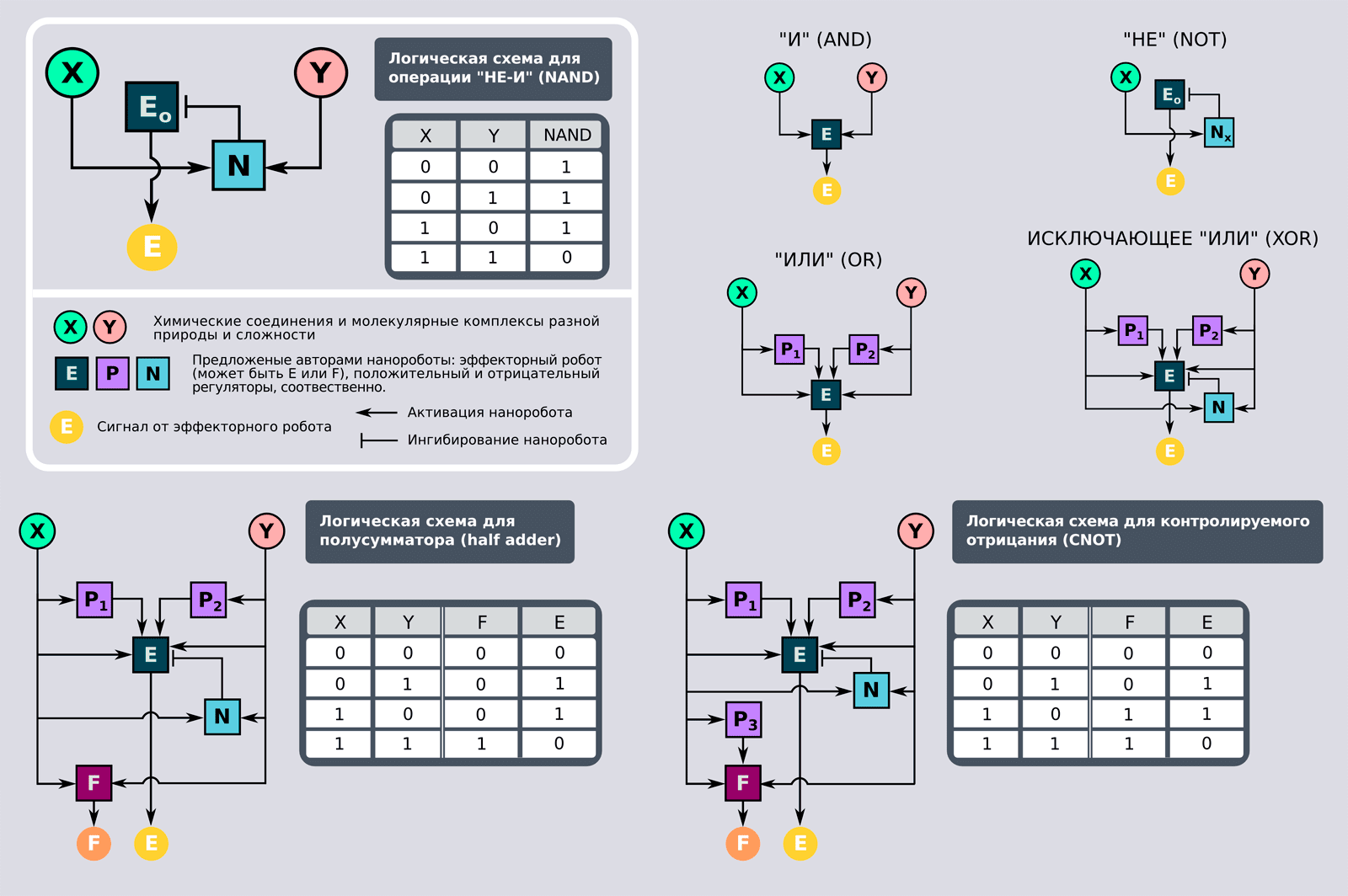
Рисунок 2. Логические вентили, собранные авторами статьи из нанороботов. Входной сигнал может быть представлен одним битом (X) или двумя битами (X и Y), которые являются биологическими молекулами. Выходной сигнал (один или два бита) представляет собой состояние эффекторных роботов (E и F), которое считывается с помощью флуоресценции.
Так, работа трех нанороботов приводила к реализации двух исходов — выпускать молекулярный груз или не выпускать. Для решения более сложных задач авторы использовали дополнительных эффекторных роботов F (похожих на E, но не интерферирующих с ним) и Eo (в отличие от E, он изначально открыт). Такое решение позволило строить гораздо более сложные логические схемы. Исследователи утверждают, что при добавлении дополнительных эффекторных роботов и специальных регуляторов, ничто не мешает данной технологии превысить мощность старых компьютеров Commodore 64 и Atari 800, на которых они играли в детстве. Сложность состоит лишь в том, чтобы собрать как можно больше правильно взаимодействующих друг с другом логических вентилей.
В качестве молекулярного груза эффекторного робота может выступать практически любая молекула. Это может быть активатор или ингибитор тех или иных молекулярных реакций, либо антитело, которое свяжет вирус или другое вредное соединение. В описанном эксперименте осуществлялось связывание робота с клетками крови таракана, которые потом исследовались при помощи проточной цитометрии. При исследовании крови подопытных, часть кровяных клеток флуоресцировала в необходимом диапазоне длин волн, что говорит о связывании антитела с гемоцитом и, следовательно, успешной активации эффекторных нанороботов (рис. 3а).
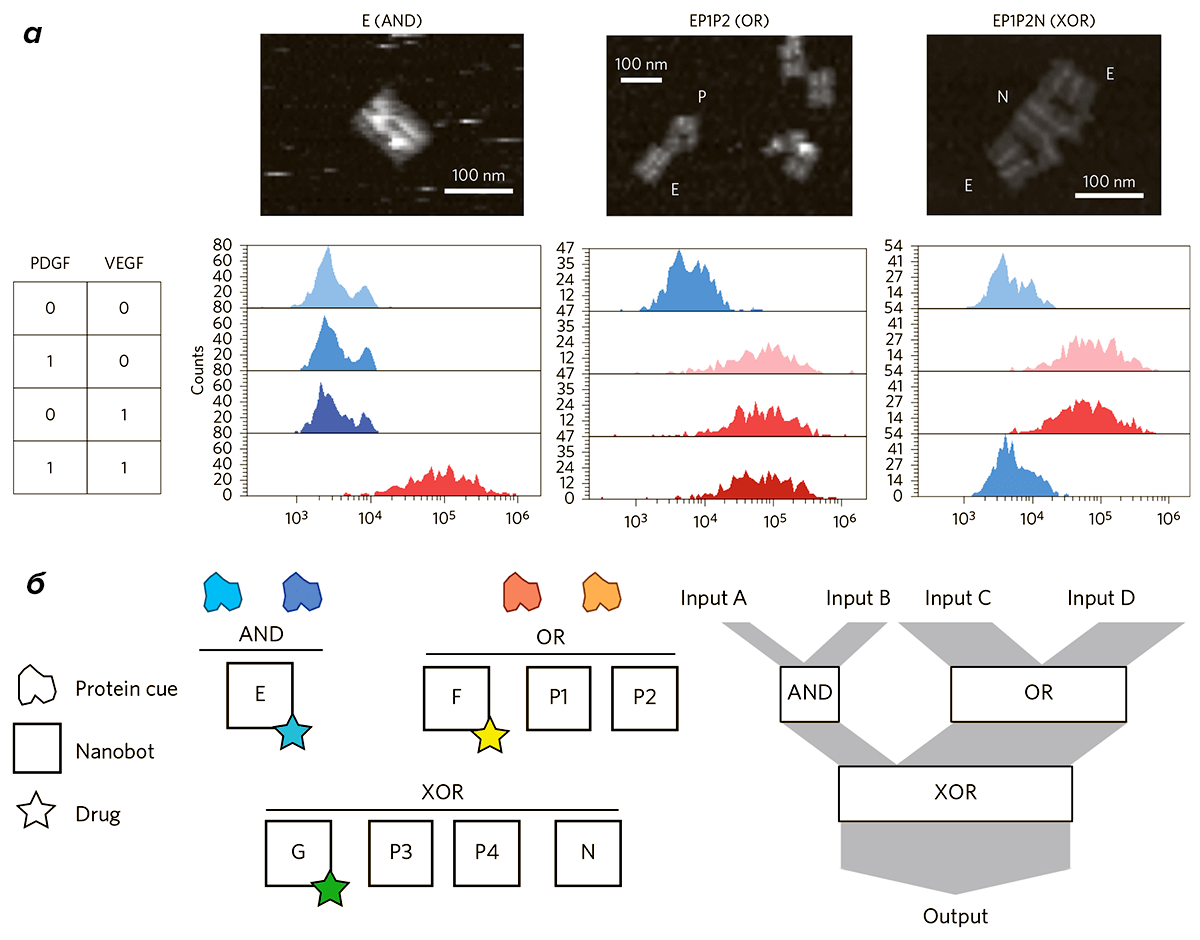
Рисунок 3. Использование ДНК-роботов. а — Сверху: изображение трех комплексов нанороботов, имитирующих поведение логических вентилей AND, OR и XOR (атомно-силовая микроскопия). Снизу: сигнал флуоресценции, регистрируемый методом проточной цитометрии, полученный от этих вентилей при регистрации молекул PDGF и VEGF в крови таракана. б — Один из вариантов построения сложной логической схемы для регистрации четырех молекул и постановки диагноза. На основании их присутствия принимается решение об освобождении трех видов терапевтических молекул (по одной на каждый логический вентиль).
Для первого этапа исследований выбор пал на тараканов Blaberus discoidalis, и сделано это было неслучайно. Во-первых, они обладают малым объемом крови, и, как следствие, требуется меньшее количество нанороботов для того, чтобы показать состоятельность методики. Во-вторых, в крови тараканов невысока концентрация разрушающих чужеродную ДНК нуклеаз, что обеспечивает длительную стабильную работу ДНК-конструкций. Пока все эксперименты проводились только на тараканах, но ученые полагают, что с добавлением некоторых модификаций в конструкции нанороботов тот же принцип работы будет реализован и в других организмах. Так, например, препятствие, которое представляет собой работа нуклеаз, можно преодолеть, используя в качестве строительного материала вместо ДНК закрытые нуклеиновые кислоты (LNA).
Полученные результаты могут найти свое применение в информационных технологиях, биотехнологии и медицине. Описанная выше методика имитирует поведение арифметико-логического устройства (АЛУ) компьютера, что может быть использовано в разработке молекулярных компьютеров будущего. При помощи предложенных авторами базовых элементов можно построить довольно сложные логические схемы, реализующие замысловатые алгоритмы (рис. 3б). Так как роль груза в эффекторном роботе может играть практически любая молекула, то такие системы можно использовать в качестве сенсоров, аналогично существующим сейчас микрочипам. Они позволят идентифицировать даже самые незначительные изменения в молекулярном окружении (регистрация единичных молекул). Изменится лишь способ считывания информации — каждому набору целевых молекул будет соответствовать свой двоичный код.
Также интересная перспектива использования описанных нанороботов — это создание «умных» лекарств. Запущенная в кровеносное русло команда нанороботов, в зависимости от программы и присутствующих в крови веществ (молекул, вирусов, бактерий и т.д.), сама поставит диагноз и выпустит необходимые лекарственные препараты. Для здорового человека такое лекарство будет совершенно безвредным, ведь, не обнаружив патогенов, нанороботы оставят молекулярный груз при себе. Возможен сценарий адресной доставки лекарств к определенному органу и последующее выведение лишних ДНК-роботов из организма. К несомненным плюсам таких лекарств относится возможность раннего обнаружения, например, единичных вирусов, и незамедлительное их уничтожение, а также низкая токсичность такой терапии.
Созданы первые в мире роботы, состоящие только из живых клеток


Ученые окрестили свое изобретение «ксеноботом». Такой бот представляет собой крошечный шарик субмиллиметрового размера, содержащий от 500 до 1000 клеток. Ксеноботы способны самостоятельно перемещаться в питательной среде чашки Петри, самоорганизовываться и даже транспортировать небольшие грузы. Более того, они не похожи ни на один живой организм или орган, с которыми биологи и генетики сталкивались до сих пор.
Потенциал использования «живых машин» колоссален. В первую очередь это, безусловно, доставка лекарственных компонентов к поврежденным областям организма, минуя многочисленные барьерные системы. Но это лишь одно из десятков и сотен применений, которые можно придумать роботам – по факту, они могут даже восстановить экологию в целом регионе.
Джошуа Бонгар, ученый и робототехник из Университета Вермонта, заявляет, что ксеноботы не являются ни традиционными роботами, ни живыми существами, известными науке. «Это новый класс изобретений – живой, программируемый организм».
Разрабатывать чудо-роботов помогал суперкомпьютер, на базе которого был запущен алгоритм для комбинирования нескольких сотен клеток кожи и сердца лягушки во множестве разных конфигураций. Проще всего представить себе кубики LEGO, из который под конкретные нужды составляет определенная модель.
В результате нескольких циклов были отобраны самые устойчивые и долговечные комбинации клеток, которые потом были установлены на специальную матрицу, собранную из эмбрионов африканских лягушек. Это была кропотливая работа с использованием микрощипцов и электродов.
В результате получились стабильные структуры, способные перемещаться. Клетки кожи действуют как своего рода леса, удерживающие все вместе, в то время как сокращения клеток сердечной мышцы помогают роботам двигаться. В течение недели они свободно перемещались по водной среде без какой-либо подпитки, работая исключительно на заранее «загруженных» запасах энергии в виде белков и липидов.
Ксеноботы, как уже было сказано, смогли перемещать объекты сопоставимого размера. В случае, когда груз был разбросан по разным местам, боты двигались сообща, подталкивая частицы к одной конкретной точке:


Биолог Михаил Левин отмечает, что, хоть по факту ксеноботы на 100% состоят из клеток лягушек, никакими лягушками они не являются. «Сразу возникает вопрос – а какие еще комбинации мы сможем собрать из клеток обычных организмов? Как сильно они будут отличаться от анатомии условных оригиналов и на что будут способны?», задается вопросом ученый.
Можно ли называть ксеноботов по-настоящему живыми? Это уже вопрос терминологии. На самом деле, хоть роботы и состоят из биотканей, однако не могут ни саморазвиваться, ни размножаться – у них попросту отсутствуют репродуктивные механизмы. Когда в клетках заканчиваются питательные вещества, то боты просто превращаются в кучку мертвой органики. Кстати, в отличие от обычных роботов, они полностью биоразлагаемы, а значит не способны навредить экологии.
Куда могут развиваться биороботы? Как мы уже говорили, направлений для работы с ними великое множество. Да, в их структуру можно включить клетки нервной системы, что увеличит их потенциал. Да, их можно превратить в весьма эффективное биооружие. Плохо ли это? Едва ли. Как и в случае с любым изобретением, степень его применения определяет только человек. Возможно, именно будущие поколения ксеноботов помогут нам победить большинство известных болезней, старость, восстановить экологию планеты. Как знать, может быть именно они станут той самой отправной точкой, благодаря которой человечество вступит в новую эру биотехнологий?
Кстати, для интересующихся разработчики опубликовали исходники своего алгоритма на Гитхабе.
Неогенетика: кто займется программированием живых организмов?
Еще недавно о том, чтобы создавать клетки, выполняющие заложенные человеком программы, можно было только фантазировать, но на наших глазах это становится реальностью. Используя живую клетку как “болванку”, ученые могут вкладывать в нее созданные ими алгоритмы (пока довольно простые). В будущем запрограммированные клетки могли бы лечить неполадки в нашем теле, производить нужные нам вещества (лекарства, топливо).
Чтобы “перепрограммировать” клетку недостаточно добавить тот или иной ген (“ген способности вырабатывать биотопливо”), нужно построить систему, в которую входят взаимодействующие друг с другом гены и их продукты – белки. Такие системы называются генными сетями.
Гены сплетаются в сеть
Ген – это участок ДНК, кодирующий один белок. Белки в клетке выполняют всю основную работу. В середине прошлого века ученые выяснили, что они также могут влиять на активность генов (под активностью гена понимается скорость синтеза с него белка: чем более он активен, тем больше с него синтезируется белка за единицу времени).
Для того чтобы белки могли управлять генами, в молекуле ДНК присутствуют особые регуляторные участки. Присоединение к ним белков приводит либо к увеличению, либо к уменьшению (вплоть до “выключения”) активности некоторого гена. У одного гена может быть несколько регуляторных участков – своего рода рычагов управления, к которым могут присоединяться различные белки.
Зачем же нужно управлять активностью генов? Рассмотрим для начала относительно просто устроенные организмы – одноклеточных.
Зачем организмам генные сети?
У всех живых организмов за “переваривание” пищи отвечают особые белки – ферменты. Пусть некоторая группа ферментов служит для переваривания какого-то питательного вещества, например, лактозы – любимого лакомства некоторых бактерий. Время жизни фермента (его ресурс) ограничен, а производство новых белков требует затрат энергии. Поэтому, если в течении длительного времени данного питательного вещества в среде нет, то белки для его переваривания выгодней не производить.
Именно так и поступают бактерии. У них есть один управляющий ген, который включает или выключает гены, кодирующие белки, необходимые для расщепления лактозы. Активность этого управляющего гена зависит от наличия лактозы в среде. Получается, нечто вроде подпрограммы, которая запускается лишь тогда, когда она нужна.
В самом начале своей жизни каждый из нас был всего одной клеткой. Она многократно делилась, и в итоге из ее копий было построено наше тело. Генотипы всех клеток нашего организма одинаковы, ведь молекула ДНК копируется при делении очень точно. Возникает вопрос: почему же тогда сами клетки разные?
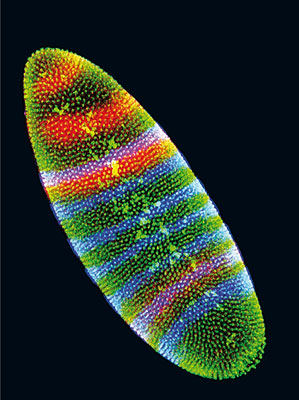
Во время развития эмбриона мухи дрозофилы различные гены активируются в разных частях тела, благодаря чему они отличаются друг от друга
Объясняется это тем, что только небольшая часть генов внутри клеток находится в активном состоянии. В разных клетках набор “включенных” генов различен, а значит, в них будут синтезироваться разные белки, они будут работать по различным программам, то есть отличаться внутренне и внешне. “Судьба” клеток (какой стать нервной клеткой, а какой – мышечной) решается во время развития зародыша.
Генные сети внутри нас
Искусственные часы были изобретены человечеством около 4-х тысяч лет назад. Но природа придумала часовой механизм намного раньше – за миллиарды лет до этого. Даже в примитивных бактериях существуют процессы, ежесуточно отмеряющие время (они называются циркадными).
Есть такие внутренние биологические часы и внутри людей. Они позволяют организму находиться в оптимальном для данного времени суток состоянии и управляют циклом сон-бодрствование.
Основные часы находятся в одной из областей головного мозга – супрахиазматическом ядре. Генные сети, функционирующие в нейронах, меняют их состояние. Нервные клетки передают сигналы дальше, вызывая в нас желание спать ночью и бодрствовать днем, а также подстраивают работу внутренних органов. От сетчатки глаза в супрахиазматическое ядро идет пучок нервных волокон, что позволяет “подводить” часы под режим смены дня и ночи (поэтому мы можем постепенно втягиваться в правильный ритм после дальних перелетов в другие часовые пояса).
В начале XXI века ученые смогли разобраться, как именно работают такие часы. Было найдено более 50 “часовых” генов, на взаимодействии которых и построен этот механизм.
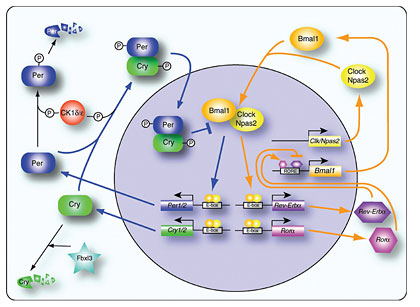
Схема основных взаимодействий генов и белков внутренних часов
В этой сети существует две сигнальные цепочки, показанные оранжевыми и голубыми линиями. Они активируются друг другом поочередно, что можно сравнить с колебаниями маятника. Дополнительные элементы нужны для большей стабильности механизма в целом (вопреки случайностям молекулярных взаимодействий) и для “подводки” часов.
У большинства людей весь описанный цикл проходит за 24-25 часов, но при некоторых мутациях он может сильно отклоняться, что приводит к появлению “настоящих”, ярко выраженных сов и жаворонков.
Расшифровка генных сетей
Выше – лишь несколько функций, выполняемых благодаря взаимодействию генов. На самом деле их гораздо больше. Это наиболее древний (из сохранившихся) метод управления в живых системах. Он отвечает за основные клеточные механизмы (рост, деление, переваривание или запасание питательных веществ). Генные сети можно сравнить с ассемблером – одним из наиболее низкоуровневых языков программирования для компьютеров.
Чтобы расшифровать генную сеть, нужно найти взаимодействующие гены и выяснить характер (торможение или активация) и силу их связи. На основе полученной информации можно строить компьютерные вычислительные модели, которые просчитывают эти взаимодействия. Этим занимаются молекулярные биологи и биоинформатики. У расшифровки генных сетей есть два главных практических применения: медицинское и технологическое.
Ряд заболеваний (особенно “возрастных”) происходит из-за разлада механизмов взаимодействия генов. Генные сети активно используют вирусы, когда проникают в клетку хозяина. Для поиска средств борьбы с этими напастями фармакологические компании проводят огромное число опытов с вероятными претендентами на роль эффективного лекарства. Обладая моделью происходящих внутри клетки процессов, подобные опыты можно проводить не на лабораторных животных, а при помощи компьютерного моделирования, что и дешевле и быстрее. Подобные модели позволяют искать как потенциальные мишени для лекарств, так и лекарственные вещества, воздействующие на них. Это обеспечивает интерес (выражающийся в финансировании) медицинских компаний к расшифровке генных сетей.
Другим возможными практическим применением генных сетей является “программирование” живых клеток на выполнение нужных нам функций. Это может быть синтез лекарственных веществ (антибиотики и не только), биотоплива, кормов для животных и не только.
В последнее десятилетие зародилась и становится все более популярной синтетическая биология. На протяжении веков биологи изучали организмы, созданные природой в ходе эволюции. Идея синтетической биологии в том, чтобы самим проектировать живые системы с нужными свойствами. Это нужно не только для практических задач, но и для фундаментального познания природы. Ведь единственный способ действительно понять что-то – научиться делать, конструировать.
В синтетической биологии существуют два основных направления. Первое – создание простейших живых систем “с нуля”. Второе – внедрение в живую клетку искусственных геномов или их участков. Разница примерно такая же, как между созданием компьютера и написанием для него программы. Первое – еще не удается, а вот второе – вполне.
Первым успехом по внедрению искусственной генной сети стало создание Майклом Еловицом (Michael Elowitz) и Станисласом Лайблером (Stanislas Leibler) “Репрессилятора” (Repressilator), который заставлял бактерий “мигать” наподобие новогодней гирлянды. Схема его простая: три гена, последовательно тормозящие друг друга, и еще один, который вырабатывает светящийся белок.

Ген GFP вырабатывает светящийся белок, а остальные входят в “часовой механизм”
Компьютерное моделирование показывало, что подобная схема должна привести к периодическим колебаниям в активности генов. Это же показали и живые бактерии, которым были внедрены (при помощи плазмид, небольших участков ДНК, которые самостоятельно встраиваются в геном бактерий) нужные гены. Что любопытно, несмотря на то, что генная сеть “Репрессилятора” была для каждой бактерии одинакова, вели они себя немного по разному: активность генов у них менялась с разным периодом, а у некоторых и вовсе не наблюдалось колебаний. Это объясняет, зачем для создания естественных “внутренних часов” (которые работают, к счастью, гораздо надежнее “Репрессилятора”) эволюции потребовалось не три гена, а несколько десятков: дополнительные контуры отрицательных и положительных связей повышают надежность системы.
В январе прошлого года в Nature была опубликована статья, в которой авторы (Джефф Хэсти (Jeff Hasty) и его коллеги описали создание и внедрение генной сети, обеспечивающей не только колебание уровня флюоресцентного белка, но и обмен сигналами между отдельными клетками, позволявший выполнять синхронизацию свечения между ними.
Вначале они разработали вычислительную модель подобной сети и проверили ее работоспособность на компьютере. Затем, при помощи вирусов, они встроили живым бактериям нужные гены, позаимствованные из двух видов других бактерий (наподобие того, как собирался монстр Франкенштейна) и наблюдали за поведением клеток. Бактерии вели себя очень схожим с предсказанным образом, постепенно переходя в синхронный режим колебаний.
Создаются уже и применимые на практике разработки. Так биолог Дрю Энди (Drew Endy) из MIT занимается созданием биодетектора скрытых мин. В бактерии внедряется несколько взаимодействующих генов, которые кодируют белки-рецепторы (активизирующиеся тротилом) и сказанные с ними флюоресцентные белки. Затем микроорганизмы распыляются на местности. Там, где есть тротил в почве (а он неизбежно просачивается из мины наружу), бактерии синтезируют флуоресцентный белок, после чего в темное время суток мины можно обнаружить по свечению, которое испускается микробами.
Пусть меня научат
В России биоинформатикой занимаются в лабораториях Михаила Гельфанда (Институт проблем передачи информации) и Вадима Говоруна (Институт биоорганической химии). Находят там свое место люди различных специальностей: и биологи, и физики, и математики, и программисты.
Манолов Александр,
Институт Высшей Нервной Деятельности и Нейрофизиологии РАН,
аспирант / CNews
Неогенетика: кто займется программированием живых организмов?
Еще недавно о том, чтобы создавать клетки, выполняющие заложенные человеком программы, можно было только фантазировать, но на наших глазах это становится реальностью. Используя живую клетку как “болванку”, ученые могут вкладывать в нее созданные ими алгоритмы (пока довольно простые). В будущем запрограммированные клетки могли бы лечить неполадки в нашем теле, производить нужные нам вещества (лекарства, топливо).
Чтобы “перепрограммировать” клетку недостаточно добавить тот или иной ген (“ген способности вырабатывать биотопливо”), нужно построить систему, в которую входят взаимодействующие друг с другом гены и их продукты – белки. Такие системы называются генными сетями.
Гены сплетаются в сеть
Ген – это участок ДНК, кодирующий один белок. Белки в клетке выполняют всю основную работу. В середине прошлого века ученые выяснили, что они также могут влиять на активность генов (под активностью гена понимается скорость синтеза с него белка: чем более он активен, тем больше с него синтезируется белка за единицу времени).
Для того чтобы белки могли управлять генами, в молекуле ДНК присутствуют особые регуляторные участки. Присоединение к ним белков приводит либо к увеличению, либо к уменьшению (вплоть до “выключения”) активности некоторого гена. У одного гена может быть несколько регуляторных участков – своего рода рычагов управления, к которым могут присоединяться различные белки.
Зачем же нужно управлять активностью генов? Рассмотрим для начала относительно просто устроенные организмы – одноклеточных.
Зачем организмам генные сети?
У всех живых организмов за “переваривание” пищи отвечают особые белки – ферменты. Пусть некоторая группа ферментов служит для переваривания какого-то питательного вещества, например, лактозы – любимого лакомства некоторых бактерий. Время жизни фермента (его ресурс) ограничен, а производство новых белков требует затрат энергии. Поэтому, если в течении длительного времени данного питательного вещества в среде нет, то белки для его переваривания выгодней не производить.
Именно так и поступают бактерии. У них есть один управляющий ген, который включает или выключает гены, кодирующие белки, необходимые для расщепления лактозы. Активность этого управляющего гена зависит от наличия лактозы в среде. Получается, нечто вроде подпрограммы, которая запускается лишь тогда, когда она нужна.
В самом начале своей жизни каждый из нас был всего одной клеткой. Она многократно делилась, и в итоге из ее копий было построено наше тело. Генотипы всех клеток нашего организма одинаковы, ведь молекула ДНК копируется при делении очень точно. Возникает вопрос: почему же тогда сами клетки разные?
Во время развития эмбриона мухи дрозофилы различные гены активируются в разных частях тела, благодаря чему они отличаются друг от друга
Объясняется это тем, что только небольшая часть генов внутри клеток находится в активном состоянии. В разных клетках набор “включенных” генов различен, а значит, в них будут синтезироваться разные белки, они будут работать по различным программам, то есть отличаться внутренне и внешне. “Судьба” клеток (какой стать нервной клеткой, а какой – мышечной) решается во время развития зародыша.
Генные сети внутри нас
Искусственные часы были изобретены человечеством около 4-х тысяч лет назад. Но природа придумала часовой механизм намного раньше – за миллиарды лет до этого. Даже в примитивных бактериях существуют процессы, ежесуточно отмеряющие время (они называются циркадными).
Есть такие внутренние биологические часы и внутри людей. Они позволяют организму находиться в оптимальном для данного времени суток состоянии и управляют циклом сон-бодрствование.
Основные часы находятся в одной из областей головного мозга – супрахиазматическом ядре. Генные сети, функционирующие в нейронах, меняют их состояние. Нервные клетки передают сигналы дальше, вызывая в нас желание спать ночью и бодрствовать днем, а также подстраивают работу внутренних органов. От сетчатки глаза в супрахиазматическое ядро идет пучок нервных волокон, что позволяет “подводить” часы под режим смены дня и ночи (поэтому мы можем постепенно втягиваться в правильный ритм после дальних перелетов в другие часовые пояса).
В начале XXI века ученые смогли разобраться, как именно работают такие часы. Было найдено более 50 “часовых” генов, на взаимодействии которых и построен этот механизм.
Схема основных взаимодействий генов и белков внутренних часов
В этой сети существует две сигнальные цепочки, показанные оранжевыми и голубыми линиями. Они активируются друг другом поочередно, что можно сравнить с колебаниями маятника. Дополнительные элементы нужны для большей стабильности механизма в целом (вопреки случайностям молекулярных взаимодействий) и для “подводки” часов.
У большинства людей весь описанный цикл проходит за 24-25 часов, но при некоторых мутациях он может сильно отклоняться, что приводит к появлению “настоящих”, ярко выраженных сов и жаворонков.
Расшифровка генных сетей
Выше – лишь несколько функций, выполняемых благодаря взаимодействию генов. На самом деле их гораздо больше. Это наиболее древний (из сохранившихся) метод управления в живых системах. Он отвечает за основные клеточные механизмы (рост, деление, переваривание или запасание питательных веществ). Генные сети можно сравнить с ассемблером – одним из наиболее низкоуровневых языков программирования для компьютеров.
Чтобы расшифровать генную сеть, нужно найти взаимодействующие гены и выяснить характер (торможение или активация) и силу их связи. На основе полученной информации можно строить компьютерные вычислительные модели, которые просчитывают эти взаимодействия. Этим занимаются молекулярные биологи и биоинформатики. У расшифровки генных сетей есть два главных практических применения: медицинское и технологическое.
Ряд заболеваний (особенно “возрастных”) происходит из-за разлада механизмов взаимодействия генов. Генные сети активно используют вирусы, когда проникают в клетку хозяина. Для поиска средств борьбы с этими напастями фармакологические компании проводят огромное число опытов с вероятными претендентами на роль эффективного лекарства. Обладая моделью происходящих внутри клетки процессов, подобные опыты можно проводить не на лабораторных животных, а при помощи компьютерного моделирования, что и дешевле и быстрее. Подобные модели позволяют искать как потенциальные мишени для лекарств, так и лекарственные вещества, воздействующие на них. Это обеспечивает интерес (выражающийся в финансировании) медицинских компаний к расшифровке генных сетей.
Другим возможными практическим применением генных сетей является “программирование” живых клеток на выполнение нужных нам функций. Это может быть синтез лекарственных веществ (антибиотики и не только), биотоплива, кормов для животных и не только.
В последнее десятилетие зародилась и становится все более популярной синтетическая биология. На протяжении веков биологи изучали организмы, созданные природой в ходе эволюции. Идея синтетической биологии в том, чтобы самим проектировать живые системы с нужными свойствами. Это нужно не только для практических задач, но и для фундаментального познания природы. Ведь единственный способ действительно понять что-то – научиться делать, конструировать.
В синтетической биологии существуют два основных направления. Первое – создание простейших живых систем “с нуля”. Второе – внедрение в живую клетку искусственных геномов или их участков. Разница примерно такая же, как между созданием компьютера и написанием для него программы. Первое – еще не удается, а вот второе – вполне.
Первым успехом по внедрению искусственной генной сети стало создание Майклом Еловицом (Michael Elowitz) и Станисласом Лайблером (Stanislas Leibler) “Репрессилятора” (Repressilator), который заставлял бактерий “мигать” наподобие новогодней гирлянды. Схема его простая: три гена, последовательно тормозящие друг друга, и еще один, который вырабатывает светящийся белок.
Ген GFP вырабатывает светящийся белок, а остальные входят в “часовой механизм”
Компьютерное моделирование показывало, что подобная схема должна привести к периодическим колебаниям в активности генов. Это же показали и живые бактерии, которым были внедрены (при помощи плазмид, небольших участков ДНК, которые самостоятельно встраиваются в геном бактерий) нужные гены. Что любопытно, несмотря на то, что генная сеть “Репрессилятора” была для каждой бактерии одинакова, вели они себя немного по разному: активность генов у них менялась с разным периодом, а у некоторых и вовсе не наблюдалось колебаний. Это объясняет, зачем для создания естественных “внутренних часов” (которые работают, к счастью, гораздо надежнее “Репрессилятора”) эволюции потребовалось не три гена, а несколько десятков: дополнительные контуры отрицательных и положительных связей повышают надежность системы.
В январе прошлого года в Nature была опубликована статья, в которой авторы (Джефф Хэсти (Jeff Hasty) и его коллеги описали создание и внедрение генной сети, обеспечивающей не только колебание уровня флюоресцентного белка, но и обмен сигналами между отдельными клетками, позволявший выполнять синхронизацию свечения между ними.
Вначале они разработали вычислительную модель подобной сети и проверили ее работоспособность на компьютере. Затем, при помощи вирусов, они встроили живым бактериям нужные гены, позаимствованные из двух видов других бактерий (наподобие того, как собирался монстр Франкенштейна) и наблюдали за поведением клеток. Бактерии вели себя очень схожим с предсказанным образом, постепенно переходя в синхронный режим колебаний.
Создаются уже и применимые на практике разработки. Так биолог Дрю Энди (Drew Endy) из MIT занимается созданием биодетектора скрытых мин. В бактерии внедряется несколько взаимодействующих генов, которые кодируют белки-рецепторы (активизирующиеся тротилом) и сказанные с ними флюоресцентные белки. Затем микроорганизмы распыляются на местности. Там, где есть тротил в почве (а он неизбежно просачивается из мины наружу), бактерии синтезируют флуоресцентный белок, после чего в темное время суток мины можно обнаружить по свечению, которое испускается микробами.
Пусть меня научат
В России биоинформатикой занимаются в лабораториях Михаила Гельфанда (Институт проблем передачи информации) и Вадима Говоруна (Институт биоорганической химии). Находят там свое место люди различных специальностей: и биологи, и физики, и математики, и программисты.
Манолов Александр,
Институт Высшей Нервной Деятельности и Нейрофизиологии РАН,
аспирант / CNews
Беспилотная доставка: автомобили без водителей развозят продукты в Бутове

Не так давно окраина Бутова в Москве превратилась в площадку для тестирования беспилотных автомобилей компании Moove. «ВкусВилл» стал первым партнером производителя «умных» машин — на беспилотниках ретейлер доставляет покупателям продукты. Правда, пока это происходит лишь в Южном Бутово, а за рулем авто сидит инженер — сейчас в России передвижение беспилотников по городу без водителя запрещено.
Основатель Moove Рамиз Мамедов начал работать над созданием беспилотника полтора года назад. Сначала компания купила автомобиль, потом первый лидар, который стоил 700 тыс. руб. Без этой технологии работа беспилотника невозможна. Именно с помощью нее машина получает информацию об окружающей среде. На автомобиле Moove установлен всего один лидар, что отличает его от беспилотников «Яндекса». Это, конечно, накладывает определенные ограничения. Например, скорость машины не превышает 30 км/ч: если она сильно разгонится, лидар не успеет отреагировать.

В багажнике автомобиля лежит ноутбук. Это также отличает беспилотник Moove от машин «Яндекса» или МФТИ: у этих компаний в работу включено больше компьютеров. Однако по заверениям Рамиза Мамедова, чтобы технология работала, достаточно и одного игрового ноутбука.
Устройство беспилотника Moove
- В машине установлены клавиатура и мышка. Именно с их помощью водитель поправляет параметры и функции беспилотника. Сделать это можно только когда автомобиль находится в движении.
- В салоне есть несколько кнопок. Первая — красная. Она представляет собой знакомую всем «вкл/выкл». Нажать нее — значит включить управление машиной. Вторая — синяя. Она активирует инвентор, который подает напряжение на все сенсоры. Последняя — зеленая — включает все блоки. Они отвечают за управление. Таких блоков всего четыре. Один связан с работой руля, второй — газа. Внизу находится третий — управление тормозами. Четвертый — так называемый шлюз, который передает все эти команды от автомобиля ко всем блокам.
- Машиной можно и нужно управлять удаленно. Сейчас ей командуют с помощью джойстика, потому что для управления через 5G и 4G не хватает скорости.
Запустить автомобиль не так сложно, как может показаться на первый взгляд. Нужно задать маршрут и выбрать точку. Можно ввести пункт назначения по адресу. Если статус цели установлен, то маршрут построен.
Во время запуска автомобиля важно, чтобы беспилотник понимал, где он находится, с точностью до 10-15 см. Для этого на нем и ездят по району. Автомобиль проезжает по нужным местам, после на компьютере запускается рендеринг и строится карта. Лидар сравнивает то изображение, которое он получает, с тем, что есть на карте. Это помогает точно показать положение машины в пространстве.
Однако в реальной жизни мы постоянно сталкиваемся с разными ситуациями, которые невозможно предугадать. Заложить их решение в программу сложно — например, появление на дороге поливальщика. Лидар воспринимает возникновение воды как препятствие, и машина начинает тормозить. Эта технология вообще реагирует на любые мелкие частицы.
«Умная» машина также с трудом функционирует во дворах. Вокруг припарковано много автомобилей — это препятствие для беспилотника. Он начинает совершать ошибки, ездить неаккуратно или вообще не двигается с места.
Все эти нюансы, осложняющие работу беспилотника, можно доработать. Через полгода Moove планирует выпустить беспилотный грузовик. Он сможет доставлять грузы между складами, где не требуется заезжать в узкие места.
Подписывайтесь также на Telegram-канал РБК Тренды и будьте в курсе актуальных тенденций и прогнозов о будущем технологий, эко-номики, образования и инноваций.
